Se presenta la evaluación de una plataforma para Interacción Física Hombre-Robot (HRpI) con base en el protocolo NASA TLX. Las variables de esfuerzo, frustración, carga mental, carga temporal y estrés son empleadas durante la interacción física entre un operador humano y un sistema robótico con propiedades de retroalimentación kinestésica. Los propósitos de la plataforma corresponden a rehabilitación de miembro superior ante la presencia de discapacidad motriz, el estudio experimental se realizó con personas sanas. Para esto, fue diseñado un ambiente virtual dinámico tridimensional como tarea de navegación. La muestra de operadores humanos consistió en estudiantes del Instituto de Ciencias de la Salud de la Universidad Autónoma del Estado de Hidalgo; de las áreas de medicina, odontología y enfermería.
Palabras clave: Sistema de Interacción Física; Protocolo NASA TLX
The assessment of a Human-Robot Physical Interaction (HRpI) Platform based on NASA TLX protocol is presented. Effort, frustration, mental load, time load and stress variables are used during physical interaction between a human operator and a robotic system with kinesthetic feedback properties. The purposes of the platform are in upper limb rehabilitation to the presence of motor disabilities, the experimental study was conducted with healthy people. To this end, a navigation task was designed in a three-dimensional dynamic virtual environment. The sample of human operators consists of students from the Institute of Health Sciences at the Autonomous University of the Hidalgo State; from medicine, dentistry and nursing areas.
Keywords: Physical Interaction System; NASA TLX Protocol
La robótica ha revolucionado el mundo de la medicina siendo una herramienta coadyuvante en análisis y en la terapia física. Los robots tienen sistemas que evocan movimientos a través de protocolos prediseñados los cuales identifican y evalúan movimientos dinámicos así como trastornos de coordinación.
Para los sistemas de interacción física hombre-robot, los esquemas clásicos de evaluación corresponden a la medición de las variables física que describen el desempeño del sistema robótico, particularmente la convergencia y la energía de intercambio.
Sin embargo, diversos resultados obtenidos en el “Laboratorio Robótica Avanzada e Interfaces Hápticas en la Universidad Autónoma del Estado de Hidalgo en México”, ha permitido observar que el desempeño no solo depende de la tarea definida en el robot como una consigna de movimiento, también de la percepción del usuario en el uso de esa interfaz; los criterios empleados en interfaces hombre máquina corresponden a indicadores de usabilidad y utilidad, no así cuando hay una interacción física[1] .
En este estudio, se identificó la relación estrecha entre las variables físicas de desempeño robótico con las sensaciones existentes en el ser humano en el momento de realizar una tarea. Incorporando a la investigación una serie de variables que pueden tener efectos en los indicadores resultantes; tales como variables físicas ambientales (iluminación, humedad relativa, temperatura y ruido) y los signos vitales de los participantes, cuyo propósito es discriminar experimentos motivados por cambios en estas variables.
El estudio nace a partir de identificar como se sienten las personas con el uso de una interfaz computacional y un dispositivo háptico, con la finalidad de realizar una tarea de neurorehabilitación robótica basada en guiado kinestésico local para miembro superior con movimiento involuntario[2] , este proceso se ha centrado en las personas que presentan alguna discapacidad motriz que demandan los beneficios de acciones especializadas en el campo de la prevención, promoción, asistencia, rehabilitación y habilitación para el desarrollo de sus potencialidades, tales como el volver a escribir, desplazar objetos con desempeño biomecánico natural, así como las tareas que involucran la coordinación de ambas extremidades; con la finalidad de reintegrarse a las actividades cotidianas y sociales que le permitan contar con una mejor calidad de vida.
Mediante la háptica que es el estudio para estimular al sentido humano del tacto con un mundo generado por una computadora. Un problema de los sistemas actuales de realidad virtual se identifica en la falta de estímulos para el sentido del tacto. La investigación háptica intenta resolver estos problemas y puede ser subdividida dentro de dos subcampos: la retroalimentación de fuerza (kinestésica) y la retroalimentación táctil.
Ivan Sutherland, uno de los fundadores de la realidad virtual, sugirió que el "sentido humano kinestésico es como otro canal independiente del cerebro, un canal cuya información es asimilada de una manera bastante subconsciente"1.
Para realizar la evaluación se utilizó la herramienta que se describe a través del protocolo NASA TLX, que permite medir la carga de trabajo que representa hipotéticamente identificar el costo incurrido por un operador humano para alcanzar un determinado nivel de rendimiento. Por lo tanto, la definición de la carga de trabajo se centra en el hombre, en lugar de centrarse en la tarea[3] .
La técnica de calificación que utiliza el protocolo NASA TLX, es subjetiva, multidimensional y proporciona un método por el cual específica fuentes de carga de trabajo relevantes para una tarea dada que pueden ser identificados y considerados en el cálculo de una calificación global de carga de trabajo. Se combina la información acerca de estos factores, reduciendo algunas fuentes de variabilidad entre sujetos que son experimentalmente irrelevantes, y haciendo hincapié en la contribución de otras fuentes de variabilidad que son experimentalmente relevantes.
Los sistemas de interacción física hombre-robot (HRpI), representan herramientas tecnológicas de entrenamiento de alto desempeño; sus aplicaciones en cirugía, manejo de herramienta, entretenimiento y operación remota de sistemas robóticos complejos, así como de vehículos móviles no tripulados permiten validar el interés de la comunidad científica en proponer estrategias nuevas y novedosas en construcción, planificación, control, decisión en condiciones de contingencia y operación en ambientes con incertidumbre.
En la literatura se reportan diversas contribuciones al respecto, así como estrategias que validan el desempeño, algunas corresponden a la medición de variables físicas de interacción, sin embargo la gran mayoría de las propuestas constituyen el uso de protocolos con tendencia subjetiva que dependen de la percepción del usuario en el desarrollo de una tarea de entrenamiento.
La realización de este estudio permitió una evaluación del comportamiento del ser humano utilizando el método base en la carga de trabajo con la interacción basada en el protocolo NASA TLX[4] donde a partir de los indicadores de esfuerzo, frustración, carga mental, carga temporal y estrés, y su relación con la usabilidad y la utilidad en sistemas de interacción física hombre– robot a través de los dispositivos hápticos[5] ; además de las variables de medio ambiente (luz, ruido, humedad y temperatura) y para identificar los cambios en las personas que participaron en esta investigación se les tomaran sus signos vitales antes y después de realizar la tarea.
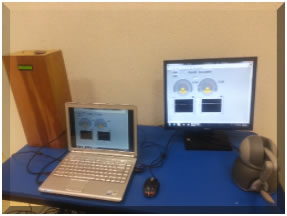
Se instaló el equipo en un aula del Centro Latinoamericano de Educación Médica por Simulación (CLEMS) del Área Académica de Medicina del Instituto de Ciencias de la Salud de la UAEH.; como se muestra en la siguiente figura 1 y 2.
figura 1. Sistema del Hipertubo y medio ambiente
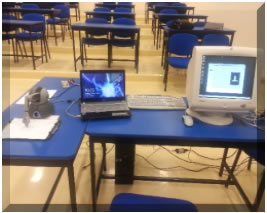
Figura 2 .Sistema de Circunferencia.
La evaluación NASA TLX es un método subjetivo y ponderado, una herramienta con que se realiza la evaluación de un Sistema de Interacción Física Hombre- Robot.
El NASA TLX (Task Load Index)[6] es un procedimiento de valoración multidimensional que da una puntuación global de carga de trabajo, basada en una media ponderada de las puntuaciones en seis sub-escalas, de estas, tres se refieren a las demandas impuestas a la persona (demandas mentales, físicas y temporales) y las otras tres se refieren a la interacción de la persona con la tarea (esfuerzo, frustración y rendimiento); cuyo contenido es el resultado de la investigación dirigida a aislar de forma empírica y a definir los factores que son de relevancia en la experiencia subjetiva de carga de trabajo.
El supuesto que la experiencia subjetiva de carga resume las influencias de diversos factores además de las demandas objetivas impuestas por la tarea. La carga no es una característica inherente a la tarea sino que es el resultado de la interacción entre los requerimientos de la tarea; las circunstancias bajo la que se desarrolla y las capacidades, conductas y percepciones del operador.
Para el diseño del instrumento se implementó con el protocolo NASA Task Load Index (NASA-TLX), con recomendaciones existentes en la literatura y con la finalidad de entender su usabilidad debido a que es una herramienta de evaluación subjetiva y multidimensional que las tasas de carga de trabajo percibida, con el fin de evaluar una tarea, el sistema o la eficacia del equipo o de otros aspectos del rendimiento y así poder construir un instrumento que nos permita medir sus seis sub-escalas (Demanda Mental; Demanda Física; Demanda Temporal; Rendimiento; Esfuerzo y Frustración).
La encuesta para “evaluar un sistema de interacción física basada en el protocolo NASA TLX”, está conformada de dos partes una es el diseño del cuestionario que capta los datos demográficos del participante y la segunda parte es la ponderación de cada respuesta del instrumento, una vez realizada la carga de trabajo en los dispositivos hápticos, y con la valoración de cada participante se realizó la evaluación de manera subjetiva y multidimensional en la carga de trabajo percibida en la ejecución.
Finalmente en la ejecución de este estudio se consideraron las siguientes actividades, que permitieron llevar a cabo los usuarios a través de la tarea de navegación con guiado kinestésico local para un miembro superior:
Como se puede ver en la siguiente figura 3.

Figura 3. Ejecución de la investigación para la evaluación de un Sistema de Interacción Física Hombre-Robot (HRpI) con base en el protocolo NASA TLX.
Los participantes en la muestra del estudio fueron 248 estudiantes de licenciatura seleccionados al azar y toda vez que cumplieron con los criterios de inclusión, exclusión y/o eliminación; finalmente se obtuvieron resultados confiables de 204 encuestas, por lo que al respecto se cumplió con el cometido de evitar un error de selección y de esta manera se cumple con la muestra para población finita conocida con el 95% de confiabilidad, un límite de aceptación del 1.65 y un error aceptable 0.05; con este dato nos indica un tamaño de muestra aceptable para el estudio.
Los resultados a la aplicación de la encuesta “Evaluación de un Sistema de Interacción Físico Hombre-Robot basado en el protocolo NASA TLX”; fueron los siguientes:
En cuanto a los Datos Biológicos en esta investigación se encontró, en el caso de la temperatura corporal inicial un promedio de 36.1 grados; la media de 36.2 grados y la varianza en 0.381; para la temperatura final el promedio fue 36.5 grados; una media de 36.3 grados y una varianza de 0.444.
Del total de los participantes se identificó que el 20% tienen la edad de 19 años y con ello la mayor variación en la temperatura corporal. En cuanto al Programa Educativo se identificó que Odontología tuvo la mayor variación de temperatura corporal, debido a que se representaron cambios en el 60% del total de los participantes. En la temperatura corporal de los 204 participantes se identificó una variación de grados en 45 registros que van del -2.1 al 2.7 puntos; en el cero encontramos 32 registros de los participantes que se mantuvieron estables en el desarrollo de la investigación; es decir el 16% de los participantes no presentó ningún cambio en su temperatura corporal.
Se puede deducir que el cuerpo humano al realizar un esfuerzo, sufre un incremento de su temperatura corporal; esto se debe a los movimientos de sus músculos y a la tensión de la carga mental ejercida.
La frecuencia cardiaca se tomó en reposo y los resultados que se registraron al iniciar la investigación mostró un rango de 52 a 104 pulsaciones y la finalizar la tarea de carga se registraron de 56 a 105 pulsaciones por minuto. Se identificó una media al inicial de 71.6 pulsaciones y al finalizar de 76 pulsaciones por minuto. La variaciones de las pulsaciones al iniciar y finalizar del experimento fueron de -40 a 35 registros, es decir se presentaron 75 variaciones. En las variaciones de frecuencia cardiaca se identificó que el 40% está representado por el género masculino y el 60% por el femenino.
El 35% de los participantes no registró ningún cambio en su presión arterial sistólica tomada al inicio del experimento y al final de él. Al realizar el extracto de información se identificó que los participantes del Programa Educativo de Medicina el 30%, para Odontología el 39% y Enfermería el 32% no registraron cambios.
En la presión arterial diastólica al inicio y al finalizar el experimento se identificó que el 40% de los participantes no registro ningún cambio. La variación o estabilidad de la presión arterial podría estar relacionada con la experiencia del participante con juegos de realidad virtual, de los cuales se identificó el 41% que si tiene experiencia en juegos de realidad virtual, se mantuvo estable en su presión arterial.
Para el caso de los datos del medio ambiente se observó que mientras más alta era la temperatura ambiente la humedad bajaba; el comportamiento de la mezcla de aire seco y vapor de agua sigue la ley de Boyle Mariotte de las presiones y volumen inicial y final; cuando aumenta la presión, el volumen baja, mientras que si la presión disminuye el volumen aumenta. Con respecto a la luz y el ruido, la investigación se realizó en un área de simulación de un hospital, que se encuentra ubicada en la Quinta Etapa del Instituto de Ciencias de la Salud el “Centro Latinoamericano de Educación Médica por Simulación” CLEMPS donde cuenta con los estándares de luz establecidos para un área de estudio, esos datos no cambiaron y por reglamento se mantiene en silencio; sin embargo se captaron datos que presentaba un mínimo de ruido al iniciar la investigación y conforme avanzaba el proceso llega a subir y se mantenía en un bullicio leve, el cual no desconcentró a los participantes en su carga de trabajo.
Los datos analizados con los Dispositivo háptico Phantom Omni en el guiado activo[7] los participantes tuvieron diferentes tiempos en la realización de la carga de trabajo marcando como un mínimo de 10 segundos; un máximo de 133 segundos y un promedio de 32 segundos; se puede identificar que los participantes realizaron en promedio 233 movimientos en el espacio de trabajo con un mínimo de 75 movimiento y un máximo de 952 movimiento; además de identificar las colisiones para el primer ejercicio donde en promedio fueron 71 y como máximo 393 y como mínimo 0 es decir una persona realizó la trayectoria sin colisiones.
Se puede decir que el desempeño de los participantes realizando la carga de trabajo el 31% de los movimientos realizados provocaron colisiones dentro del hipertubo en el caso de la circunferencia solo se determinó el tiempo que tardaron en realizar la circunferencia. El 65.8% de los participantes concluyeron la actividad de la cargar de trabajo en el hipertubo y la circunferencia con una calificación de 10 y 9; es decir realizaron la actividad independientemente de cómo se sintieron en el proceso para el resto que es el 34.1% concluyó la actividad con una calificación menor.
Finalmente en la aplicación de la encuesta “Evaluación de una interfaz Hombre-Robot basado en el protocolo NASA TLX”, en el apartado de NASA TLX que cuenta con 6 sub-escalas donde al realizar el análisis e identificar el nivel de satisfacción del usuario en la realización de la carga de trabajo. Como se muestra en la tabla 1.
Tabla 1. Resultados de la aplicación del Protocolo NASA TLX
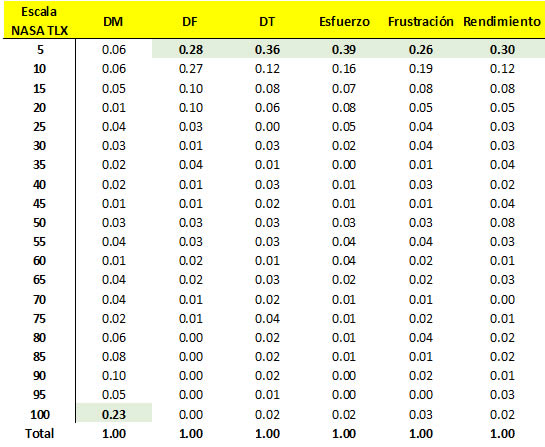
Fuente: N=204 Aplicación del Cuestionario “Evaluación de una Interfaz Hombre-Robot basado en el protocolo NASA TLX. Barrera-Gálvez R.; Domínguez-Ramírez O.; 2014.
Al realizar el análisis de los datos de los 204 participantes se identificó en la sub-escala Demanda Mental el 77% refirió que no le generó una carga mental excesiva fue fácil la actividad y en un espacio cómodo, asegurando que el factor del ruido no le generó molestia; a diferencia del 23% que identificó que si les generó una carga de trabajo con el uso de los dispositivos hápticos; el promedio de la carga de trabajo que se registró fue del 40% en el total de los participantes.
En el caso de la Demanda Física el 28% de los participantes expreso que no requirió de actividad física; cubrieron la actividad expresando que fue fácil, sus miembros superiores se encontraron libres, sin ninguna molestia musculo esquelética y expresó que la tarea le generó habilidad y destreza, rápida y no requiero de esfuerzo físico a diferencia del 72% de los participantes que expresó que si requirió de demanda física.
En la Demanda Temporal el 36% de los participantes no sintió presión de tiempo con respecto a la actividad que realizó de una manera más tranquila y sin presión a diferencia del 64% que sintió estrés al realizar la actividad, sintió que la información que tenía no era clara y la actividad fue difícil y complicada.
Para el Esfuerzo, el 39% expresó que no identificaron difícil la actividad de manera mental y físicamente, sin embargo concluyeron de manera satisfactoria la actividad; el 61% expresó que si le genero esfuerzo, atención durante la tarea para concluirla y se sintió activo al realizar la tarea.
Para el caso de Frustración el 26% expresó que no le genero inseguridad, se sintió satisfecho sin nerviosismo y el 74% se sintió inseguro, insatisfecho, no relajado y se sintió con tensión al realizar la tarea.
Finalmente en el Rendimiento el 70% sintió satisfacción en el cumplimiento de la actividad siendo de corta duración, expresando que el método utilizado fue claro, así como la planificación de la tarea; a diferencia del 30% restante.
La justificación de dicho resultado, es la tendencia en el uso de sistemas robóticos acoplados total o parcialmente en el cuerpo humano, particularmente ante la presencia de discapacidad. El flujo de energía que permite validar la transmisión de conocimiento a través de canales kinestésicos, representa una variable muy relacionada con la demanda física y que implica efectos sobre el esfuerzo. La convergencia de movimiento del robot (posición y velocidad de consigna) está estrechamente relacionada con la demanda temporal y tiene efectos sobre el nivel de frustración en el desarrollo de la tarea. La demanda mental corresponde a las características de la tarea y su planificación. El rendimiento o desempeño general de la interfaz con el usuario en el lazo de control, corresponde a las mejores condiciones de estabilización y baja carga de trabajo. Sin embargo en las condiciones que se diseñó la tarea de interacción, es evidente el alto nivel de estrés al que fue sometido. La discriminación de usuarios que efectuaron la tarea, fue gracias a la instrumentación de parámetros ambientales y de signos vitales; lo que permite garantizar mayor confiabilidad en el resulto obtenido.
[1] Brooks FP. The Computer Scientist as Toolsmith-Studies in Interactive Computer Graphics, Proceedings of IFIP; 1977, pp. 625-634.
[2] Domínguez-Ramírez OA et al, Neurorrehabilitación robótica basada en guiado kinestésico local para miembro superior con movimiento involuntario, Revista Ciencia Universitaria UAEH, Pachuca, Hgo.; 2011.
[3] Hart Sandra G. Theory and measurement of human workload, ed Human Productivity Enhancement, In J. Zeidner, New York; 1986.
[4] Hernández Ángeles Iván, Jarillo Silva Alejandro y Domínguez Ramírez Omar Arturo, PHANToM: una interfaz para retroalimentación kinestética, entrenamiento y teleoperación con propósitos de diagnóstico y rehabilitación médica, Pachuca, Hgo. s.f.
[5] Parra –Vega Vicente y Domínguez Ramírez Omar Arturo, Haptic remoto Exploración guiada de objetos deformables, Vol. 1 de 2, No. IMECE2003-43894; 2003, pp. 793-800.
[6] Hart Sandra G. y Staveland, Desarrollo de la NASA-TLX (Task Load Index): Los resultados de la investigación empírica y teórica, ed. carga mental humano, Meshkati Amsterdam: North Holland; 1988, pp. 139-183.
[7] Powell D. Implementation and Analysis of Shared-Control Guidance Paradigms for Improvend Robot-Medianted Training; 2010.
[a] Área Académica de Medicina, Instituto de Ciencias de la Salud, Universidad Autónoma del Estado de Hidalgo, México.
[b] 2Centro de Investigación en Tecnologías de Información y Sistemas, Instituto de Ciencias Básicas e Ingeniería, Universidad Autónoma del Estado de Hidalgo, México.
Correspondencia: rosariobarrerag@yahoo.com.mx