
El escaneo de los movimientos oculares ha sido reportado como una táctica eficaz en la rehabilitación de pacientes con enfermedades de vías neurológicas visuales. La neuroplasticidad se informa como una posible causa de este método de terapia en particular en seres humanos con la medición delicado comportamiento. Por lo tanto , se propone la implementación de un algoritmo de control basado en G- lenguaje para controlar un nuevo dispositivo láser servo mecanizada para la rehabilitación en enfermedades neuronales vías visuales, como hemianopsia, cuadrantanopsia y escotomas basado en los movimientos sádicos utilizando dos programas diseñados . La primera de ellas permite a los médicos para crear secuencias de estímulos audiovisuales y el segundo corre la terapia multisensorial creada durante el tiempo deseado entre 20 y 60 minutos. El algoritmo controlar un dispositivo que consiste principalmente en un puntero de láser rojo, dos servos y nueve zumbadores, de acuerdo con la secuencia anterior - diseñado, sobre la base de las deficiencias visuales de cada paciente. El puntero láser, que se utiliza para presentar los estímulos visuales en un fondo negro y que se controla con una matriz de servomotores dos grados de libertad; cinemática directa cálculos se utilizan para su control. Las instrucciones (número zumbador, cenitales y azimut coordenadas) se envían a un microcontrolador a través de USB con un puerto USB para circuito controlador serie y un puerto COM virtual.
Palabras clave: Ingeniería Biomédica, Instrumentación Virtual, Robótica, y Rehabilitación.
Scanning with ocular movements has been reported as an efficient tactic in rehabilitation of patients with visual neuro-pathways diseases. Neuroplasticity is reported as a possible cause of this particular therapy method in humans with delicate behavior measurement. Therefore, we propose the implementation of a control algorithm based on G-language to control a novel servo-mechanized laser device for rehabilitation in visual neural-pathways diseases, like hemianopia, quadrantanopia and scotomas based on saccadic movements using two designed programs. The first one enables the medics to create audiovisual stimuli sequences and the second one runs the created multi-sensorial therapy during a desired time between 20 and 60 minutes. The algorithm will control a device that mainly consists in a red laser pointer, two servos and nine buzzers, according to the previous-designed sequence, based on visual deficiencies of each patient. The laser pointer, used to present the visual stimuli on a black background and it is controlled with a two degrees-of-freedom servomotors array; forward kinematics calculations are used to control it. The instructions (buzzer number, zenith and azimuth coordinates) are sent to a microcontroller via USB with a USB to serial driver circuit and virtual COM port.
Keywords: Biomedical Engineering, Virtual Instrumentation, Robotics, and Rehabilitation.
LESIONS occurred in front of optical chiasm can cause visual field lose in only one eye whereas lesions behind can cause visual field lose in both eyes, more or less congruent to each other [1]. The total destruction of any of the visual structures behind the optical chiasm in only one side causes contralateral homonymous hemianopia [1]. Hemianopia, as with other visual field defects, is a result of retrochiasmatic lesions of visual pathways, produced by different causes, predominantly by vascular malfunctions [2].
There are two major techniques to enhance and/or repair visual field homonymous defects. The first one is to teach the patient to explore his or her blind side by compensatory saccadic movements and the other is to enhance the visual field to stimulate the border between the visible and damaged visual side [3] using a computer program. The scanning with ocular movements has been reported as an efficient tactic by the previous studies, reporting visual field enlargement up to 35° [4]. There is strong evidence supporting the effectiveness of the border zone stimulation and a possible activation of the extrastriate pathways [6],[7]. Neuroplasticity is reported as a possible cause of this particular therapy method in humans [9] with delicate behavior measurement, as measured by functional magnetic resonance (fMRI) images and positron emission tomography (PET). It has been observed that reactivation in some areas at the occipital lobe [8] and also activation in concentration areas [6].
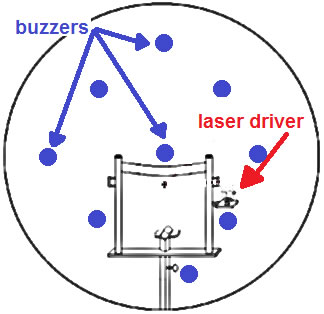
In this paper, we detail an algorithm implemented in LabVIEW to control a servo-mechanized laser and nine buzzers, both inside an acrylic semi-spherical structure (Fig.1 (I)); the laser driver consists in a two-servomotor system (1.5kg hobby servo, see [19] for details) to drive the laser attached to an ergonomic-designed chin-rest structure [13] (Fig. 1(II)) and the buzzers are attached directly to the semi-spherical structure. Compared to other devices based on visual field research, our device enables the medics to stimulate the patient’s visual field without external visual stimuli due that semi-spherical structure is complemented with another bigger semi-cylinder structure that encloses the patient’s head avoiding external stimulation. A webcam with infrared light is used for patient’s saccadic movements monitoring [10],[11].
(I)
(II)
Fig.1. (I) Acrylic structure (inferior side) where the patient is enclosed to avoid external stimulus. (II) Chin rest, corresponding proportions and measurements.
LabVIEW has a friendly COM port interface to work [18] enabling the possibility to develop a complete control system in few time.
A. Therapy design software
After a preliminary medical visual field examination, the ophthalmologists must design a special visual therapy for each patient depending upon the diagnosis.
The therapy is designed according to a modified visual field map using only 183 isopters, avoiding using the smallest ones; each isopter has both, an azimuth and a zenith values. Nine buzzers are distributed corresponding to a buzzer influence zone, according with the spatial rule of multi-sensorial integration [5],[20].
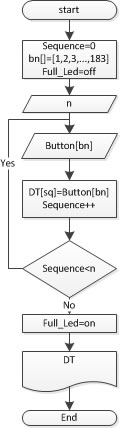
Fig 2. Flow diagram Therapy Design Software.
Fig. 2 represents the Therapy Design Software flow diagram. It describes:
B. Therapy player software
The flow diagram of the therapy software player is represented in fig. 3. The description of all blocks is described as follows:
tt = θservo(tspin + ttol) + tstimuli (1)
T = Ntt (1)
Where tt (α in the flow chart) is the time expended by both servomotors to point the laser to a given position; tspin is the time that a servomotor needs to spin one degree (according to manufacturer it is 0.00166666ms for 9g servomotors [19]);
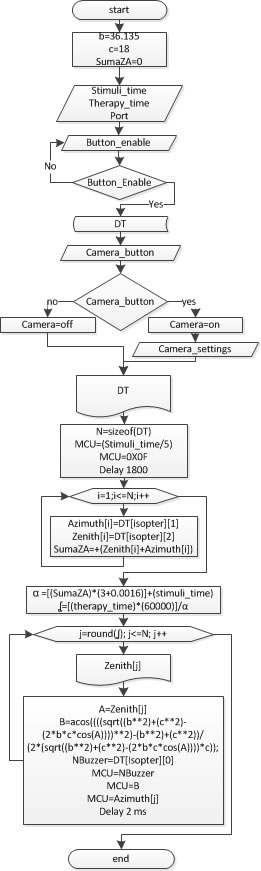
Fig. 3. Flow chart of the therapy player software.
ttol is a given tolerance time (3ms); θservo (SumaZA in the flow chart) is the addition of zenith and azimuth degrees that both servos need to spin the laser driver to point the laser beam in a given position; tstimuli (Stimuli_time in the flow chart) is the expend time needed to execute a laser beam sequence, between 250 and 605ms [16]; T (Therapy_time in the flow chart) is the total time of all repetitions in a therapy, suggested between 20 and 60 minutes and N (ʆ in the flow chart) is the number of repetitions in a therapy. It is obtained by substitute (1) in (2),

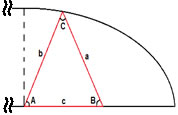
Fig. 4. Representation of the lag angle, B, of the internal servo-mechanism (magnified version of the chin-rest).
Summarizing Zenith[j] is modified using the formula that includes the declared values b and c. The result is stored in B.
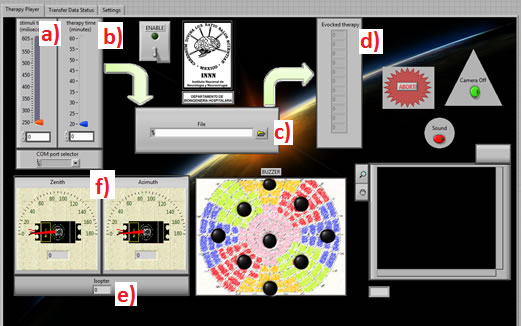
Fig. 5. Therapy player software’s screen, where (a) is the stimuli time, (b) is the total therapy time, (c) is the file path, (d) displays the numeric values of each sequence of the therapy, (e) shows the current value and (f) shows the current lag angle for zenith and azimuth values.
C. Communication between the therapy player software and the microcontroller
Modern computers rarely have RS232 inputs, because it had been gradually substituted by USB ports. USB protocol is completely different than RS232 neither in age nor in voltages levels, is that why it is necessary to use an interface to connect a single 8-bit microcontrller’s UART to USB port. The FT232RL is a TSSOP28 package integrated circuit manufactured by FTDI®. The FT232RL could converts between USB and an asynchronous serial interface [21].
This integrated circuit enables a USB port to be used as a virtual COM port on a USB host. Each chip has a full-speed USB 2.0 device port.
We have developed a circuit based in the circuit using a modification of the suggested diagram published by Axelson [22]. Our model enables only to use TX and RX pins instead four pins (fig. 6).
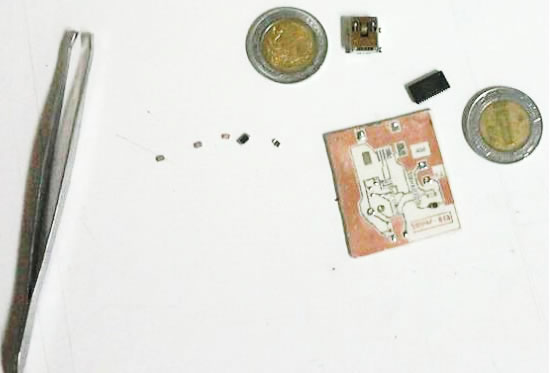
Fig. 6. PCB and SMD pieces used for the USB-UART circuit interface.
In this paper we outlined a control method for a novel servo-motorized laser device used in visual pathways diseases therapies. We believe this device is a good option to enhance visual abilities for patients with known hemianopia, quadrantanopia, scotoma and other types of cortical damages. Recent studies using the PET and fMRI imaging and detailed examinations suggest neuroplasticity effects due to learning in occipital region [17]. Further, extensive patient specific and data processing will define our future work.
The authors are grateful to Dr. Juan Valadez (Department of External Consultation), Dr. Manuel Enrique Escanio (Department of Neuro-ophthalmology) and Dr. Josefina Sandoval (Department of Neuro-image) for providing expert assistance in the clinical and neurological part; also authors are grateful with the Department of Hospital Bioengineering of the National Institute of Neurology and Neurosurgery “Manuel Velasco Suárez” for supporting the project and the instrumentations.
[1] Carlos I. Sarmiento; Jorge Hernández Camacho, Ignacio Sarmiento Vargas, Virtual Control and Monitoring for a Neurovisual Therapeutic Device. Vigésima Reunión Internacional de Otoño de Comunicaciones, Computación, Electrónica, Automatización, Robótica y Exposición Industrial. ISBN 978-607-9563U-5-9, Acapulco, Guerrero, 2013.
[2] Garoutte B. Survey of Functional Neuroanatomy. 1st ed. Greenbrae: Jones Medical Publications, 1981.
[3] Murillo-Bonilla LM, Calvo-Leroux G, Reyes-Morales S, Lozano-Elizondo D. “Hemianopsias homónimas: relación topográfica, etiológica y evolución clínica”. Arch Neurocien 2001; 2: 62-65.
[4] Schreiber A, Vonthein R, Reinhard J, Trauzettel-Klosinski S, Connert C, Schiefer U. “Effect of visual restitution training on absolute homonymus scotomas”. Neurology 2006; 67:143-145.
[5] Koons P, Scott J, Kingston J, Goodrich GL. “Scanning training in neurological visual loss: case studies”. Eye and Brain 2010; 2:47-55.
[6] Weiskrantz L, Harlow A, Barbur JL. “Factors affecting visual sensitivity in a hemianopic subject”. Brain 1991; 114:2269-2282.
[7] Romano JG. “Progress in rehabilitation of hemianopic visual field defects”. Cerebrovasc Dis 2009; 27 (suppl 1): 187-190.
[8] Marshall RS, Ferrera JJ, Barnes A, Zhang X, O’Brien KA, Chmayssani M, Hirsch J Lazar RM. “Brain activity associated with simulation therapy of the visual borderzone in hemianopic stroke patients”. Neurorehabil Neural Repair 2008; 22: 136-144.
[9] Henriksson L, Raninen A, Näsänen R, Ryvärinen L, Vanni S. “Training-induced cortical representation of a hemianopic hemifield”. J Neurol Neurosurg Psychiatry 2007; 78: 74-81.
[10] Doussoulin-Sanhueza MA. “Cómo se fundamenta la neurorrehabilitación desde el punto de vista de la neuroplasticidad”. Arch Neurocien 2011; 16: 216-222.
[11] Borah J. “Measurement techniques for eye movement”. Encyclopedia of Medical Devices and Instrumentation 2006; 3: 263-286.
[12] Halswanter T. “Mathematics of three-dimensional eye rotations”. Vision Res 1995; 12: 1727-1739.
[13] Pambakian ALM, Woodings DS, Patel N, Morland AB, Kennard C, Mannan SK. “Scanning the visual world: a study of patients with homonymous hemianopia”. J Neurlo Neurosurg Psychiatry 2000; 69: 751-759.
[14] Panero J, Zelnik M. Las Dimensiones Humanas en los Espacios Interiores. 7° ed. México: Editorial G. Gili, 1996.
[15] Fu K S, González R C, Lee C S G. Robotics: Control, Sensing, Vision and Intelligence. McGraw-Hill, 1987.
[16] Spong M W, Hutchinson S, Vidyasagar M. Robot Modeling and Control. New York: John Wiley and Sons Inc, 2005.
[17] Weiskrantz L, Harlow A, Barbur JL. “Factors affecting visual sensitivity in a hemianopic subject”. Brain 1991; 114:2269-2282.
[18] Henriksson L, Raninen A, Näsänen R, Ryvärinen L, Vanni S. “Training-induced cortical representation of a hemianopic hemifield”. J Neurol Neurosurg Psychiatry 2007; 74-81.
[19] Hernández-Camacho J, Muñoz-Hernández L, Saldaña-Sánchez A, López-Morales V. “Virtual distributed supervision and control for an automated greenhouse”. 5TH International Symposium on Robotics and Automation. 2006, ISBN 970-769-070-4.
[20] Power HD, “Model HD1900A”, 9g servomotor datasheet.
[21] Passamonti C, Bertini C, Làdavas E. “Audiovisual stimulation improves oculomotor patterns in patients with hemianopia”. Neuropsychologia 2009; 47(s):546-555.
[22] Eady F. Networking and Internetworking with Microcontrollers. Elsevier, 2004.
[23] Axelson J. Serial Port Complete: COM Ports, USB Virtual COM Ports, and Ports for Embedded Systems. 2nd Edition. Lakeview Research LLC, 2007.
[1]Carlos Ignacio Sarmiento is an Electronic Engineer at the Instituto Tecnológico de Ciudad Madero (ITCM), Mexico. He works as part-time clinical engineer and researcher in the Department of Bioengineering at the National Institute of Neurology and Neurosurgery “Manuel Velasco Suárez” in Mexico City. His research fields include robotics, neural engineering, brain-computer interfaces, neuroplasticity, neuro-ophthalmology, electronic design, bioinstrumentation biomechanics, mechatronics, medical mathematics and medical equipment repair.

[2]Jorge Hernández is Master in Computer Sciences at the Universidad Autónoma del Estado de Hidalgo (UAEH), México. Since 2008 he is titular professor and researcher with the Escuela Superior de Huejutla, a dependence of UAEH, Huejutla de Reyes, Hidalgo, Mexico. His research fields are SCADA systems, virtual instrumentation, educational systems virtual reality, genetic algorithms and artificial intelligence.

[3]Ignacio Sarmiento is Master in Engineering of Quality and Productivity at the Instituto Tecnológico y de Estudios Superiores de Monterrey, Campus Hidalgo. Since 2010 he is professor and researcher with the Escuela Superior de Huejutla, a dependence of UAEH, Huejutla de Reyes, Hidalgo, Mexico. His research fields are quality, productivity and key performance indication algorithms and general mathematics
