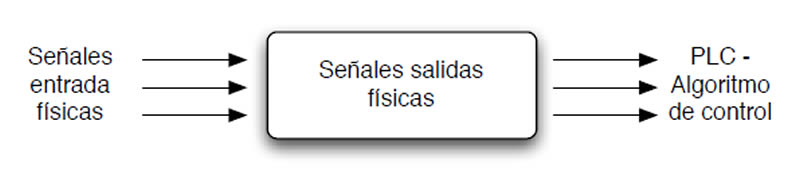
Fig. 1 Sistema basado en PLC
Diagrama Escalera es un lenguaje de programación contemplado en la norma IEC-61131-3 de la Comisión Electrotécnica Internacional para el desarrollo de algoritmos de control de sistemas basados en Controladores Lógicos Programables. La norma IEC-61131-3 solo contempla la sintaxis y semántica de los lenguajes. Los algoritmos de control en diagrama escalera son desarrollados con base en las especificaciones formales del sistema, así como, por experiencia de los responsables del control. Las redes de Petri son una herramienta gráfica y matemática para modelar Sistemas de Eventos Discretos. LDPN (ladder Diagram Petri Net, por sus siglas en inglés) es un enfoque para transformar algoritmos de control desarrollados en diagrama escalera a redes de Petri.
Palabras clave: Diagrama escalera, algoritmos de control, redes de Petri, sistemas de eventos discretos.
Ladder Diagram is a programming language included in the standard IEC-61131-3 of the International Electrotechnique Commission for the development of control algorithms based on Programmable Logic Controllers. IEC-61131-3 only takes into account the language syntax and semantic. Control algorithms in Ladder Diagram are developed based on the formal specifications of the system and the experience of the control responsible. A Petri net is a graphical and mathematical tool, which is utilized to model Discrete Event Systems. Ladder Diagram Petri Net (LDPN) is an approach to transform control algorithms developed in Ladder Diagram into Petri nets.
Keywords: Ladder diagram, control algorithms, petri nets, discrete event systems.
La Comisión Electrotécnica Internacional, a través de la norma IEC-61131-3, contempla cinco lenguajes de programación para Controladores Lógicos Programables (PLC, por sus siglas en inglés); Lista de Instrucciones, Texto Estructurado, Diagrama de Funciones Secuenciales, Diagrama de Bloques de Funciones y Diagrama Escalera (LD, por sus siglas en inglés). El LD es un lenguaje de programación que continúa utilizándose para el desarrollo de algoritmos de control de sistemas basados en PLC.
La IEC-61131-3 define la sintaxis y la semántica del lenguaje LD, no así, la validación de los algoritmos de control que se desarrollan en función de las especificaciones formales de los sistemas y con base en la experiencia de los programadores o responsables del control de los procesos, es decir, no se aplican modelos formales para la validación de los algoritmos de control que respalden la confiabilidad y seguridad del funcionamiento de las máquinas y procesos de producción o manufactura (Lee y Lee, 2009).
Las redes de Petri (PN, por sus siglas en inglés) son una herramienta gráfica y matemática que permite modelar Sistemas de Eventos Discretos (DES, por sus siglas en inglés). Los sistemas basados en PLC se caracterizan por tener señales de entrada (sensores) – evaluación del algoritmo de control en LD – y señales de salida (actuadores). Una de las interpretaciones de las transiciones y lugares de una PN es el proceso de un sistema basado en PLC (Murata, 1989).
Se han presentado diferentes enfoques de transformación de LD a PN para encontrar solución a la validación de los algoritmos de control antes de su aplicación. Solo se enuncian de forma cronológica algunos enfoques.
Frey (2000) propuso una extensión de PN, llamada Redes de Petri de Señal Interpretada para la validación y verificación de algoritmos de control; en la que plateó “convertir” las especificaciones informales en formales.
Uzam y Jones (1998) propusieron las Redes de Petri Automatizadas, las cuales son más robustas, aceptan arcos con pesos mayores a uno y lugares con más de una marca.
La técnica de mapeo fue presentada por Thapa et al. (2005) para la conversión de los elementos de LD a núcleos de PN.
La conversión de módulos específicos fue planteada por Lee y Lee (2009), donde definieron cinco módulos “comunes” utilizados en los algoritmos de control en LD y los convirtieron a módulos PN.
Las PN coloreadas es la base de la propuesta de da Silva et al. (2011), donde consideran a cada línea de control en LD de forma asilada y la representan a través de una fórmula escrita en lógica proposicional.
La conversión de LD a PN ordinaria se presentadó por Xuekum et al. (2012). El enfoque solo considera bobinas y contactos.
Quezada et al. (2014), presentaron un nuevo enfoque de transformación de LD a PN, denominado LDPN, donde se modela el energizado y desenergizado de bobinas, y su estructura en PN se muestra similar a los sistemas basados en PLC.
El presente artículo muestra un caso de estudio del algoritmo de control del llenado de un tanque (Petruzella, 2011), el cual es transformado a LDPN usando la metodología de diseño formal para transformar LD a PN. En las secciones 2 y 3 se muestran los fundamentos de LD y PN respectivamente. La definición de LDPN se presenta en la sección 4. La transformación de LD a PN de un algoritmo de control se encuentra en la sección 5 y por último, se presentan las conclusiones.
En la Figura 1 se muestra un sistema basado en PLC. El sistema tiene señales de entrada físicas que provienen de sensores discretos, en la unidad de procesamiento central se evalúa el algoritmo de control y el resultado se envía a las señales de salida físicas que están conectadas a los actuadores del proceso.
Fig. 1 Sistema basado en PLC
Un sistema basado en PLC funciona de forma cíclica, esta operación se conoce como “barrido” del PLC y con respecto al control del proceso consiste en cinco pasos fundamentales:
La norma IEC-61131-8 (2003) define el lenguaje de programación LD como una red de elementos electromecánicos funcionando al mismo tiempo. El principio de funcionamiento del LD se basa en el funcionamiento de un relevador constituido por una bobina y contactos que pueden ser normalmente abiertos (NO) y/o cerrados (NC).
Gráficamente un algoritmo de control en LD se delimita por dos líneas verticales que simulan el voltaje del sistema, es decir, la línea izquierda es el positivo de corriente directa (cd) o línea de corriente alterna (ca), mientras que la línea derecha es el negativo de cd o neutro de ca. Entre las líneas se coloca el contacto NO y/o NC en serie y/o paralelo, para terminar con una bobina. Toda línea de control debe concluir con una bobina interna o señal de salida física.
La Figura 2 muestra el algoritmo de control en LD para el arranque y paro de un motor utilizando botones de accionamiento momentáneo. Cuando se activa “Arranque” se energiza la bobina “Motor” (si “Paro” está desactivada), la cual activa su contacto (con el mismo nombre “Motor”) y mantiene la bobina energizada al desactivar el contacto “Arranque”. La bobina “Motor” se desenergiza cuando se activa la señal “Paro” y se abre el circuito hacia la bobina.
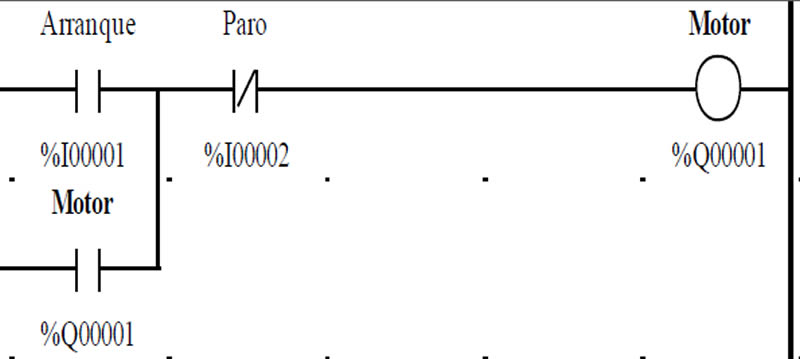
Fig. 2. Algoritmo de control en LD de arranque – paro de motor
La Tabla 1 muestra los símbolos gráficos utilizados en PN. Los círculos pueden representar señales tanto de entrada de sensores, como internas de memoria y de salida a los actuadores de un sistema basado en PLC.
Tabla 1. Símbolos utilizados en PN
 |
Lugar para señales físicas de entradas, salidas y de memoria. |
 |
Señal activa (marca). |
 |
Transición. |
 |
Arco. |
 |
Arco inhibidor. |
El círculo negro representa las señales activas en los lugares, el rectángulo negro indica las transiciones o lógica a cumplir, la flecha es el arco habilitador y la línea con terminación de círculo es el arco inhibidor. En la Tabla 2 se presenta la definición formal de las PN.
Tabla 2. Definición de PN
Una PN es una tupla de 5,  donde: donde: |
 es un conjunto finito de lugares, es un conjunto finito de lugares, |
 es un conjunto finito de transiciones, es un conjunto finito de transiciones, |
 es un conjunto de arcos, es un conjunto de arcos, |
 es una función de ponderación, es una función de ponderación, |
 es un marcado inicial, es un marcado inicial, |
 y y  |
Para la simulación del comportamiento dinámico, con base en un marcado de la PN se considera la siguiente regla de transición (Murata, 1989).
Un auto lazo en una PN es cuando el lugar de entrada también es el lugar de salida en una misma transición. A una red libre de auto lazos se le llama pura. Y a una PN donde todos sus lazos tienen ponderación de 1, se le llama ordinaria.
De la metodología formal de transformación de algoritmos de control desarrollados en LD a PN en Quezada et al. (2014) se presenta la equivalencia de la distribución de señales en LD a PN (Tabla 3) y definición formal de LDPN (Tabla 4).
La Tabla 3 muestra solo para una señal de entrada, donde se considera análogo para señales internas de memoria y señales de salida físicas. Iio se refiere al número de lugares equivalentes al número de contactos NO de la señal Iio en el algoritmo de control en LD. Equivalente para los lugares Iio.
Tabla 3. Representación de señales físicas de entrada en elementos PN
| Señal | Distribución de contactos |
 |
 |
La Tabla 4 define el LDPN con sus elementos expresados en lugares para los tres tipos de señales (discretas) en un sistema basado en PLC, además, de lugares auxiliares y de restablecimiento para las señales de salida. De igual manera, muestra los conjuntos de transiciones para la distribución correspondiente de los contactos NO y NC. El LDPN es de tipo ordinario al tener peso de uno de todos sus arcos.
Tabla 4. Definición de LDPN
| LDPN es una 5-tupla, donde: |
 es un conjunto finito de lugares, donde: es un conjunto finito de lugares, donde:I es un conjunto finito de lugares que representan señales de entrada, O es un conjunto finito de lugares que representan señales de salida, B es un conjunto finito de lugares que representan señales internas, A es un conjunto de lugares auxiliares, y G es conjunto finito de lugares para restablecer los lugares O. |
 es un conjunto finito de transiciones, donde: es un conjunto finito de transiciones, donde:Ic|o es un conjunto finito de transiciones que representan señales de entrada, Oc|o es un conjunto finito de transiciones que representa señales de salida, Bc|o es un conjunto finito de transiciones que representa señales internas, y R es un conjunto finito de transiciones para restablecer lugares. |
 es un conjunto de arcos. es un conjunto de arcos. |
 es una función de ponderación. es una función de ponderación. |
 es un marcado inicial. es un marcado inicial. |
La intención del presente artículo es la conversión de algoritmo de control en LD a PN, por lo que se omiten las expresiones matemáticas que modelan el comportamiento dinámico del LDPN.
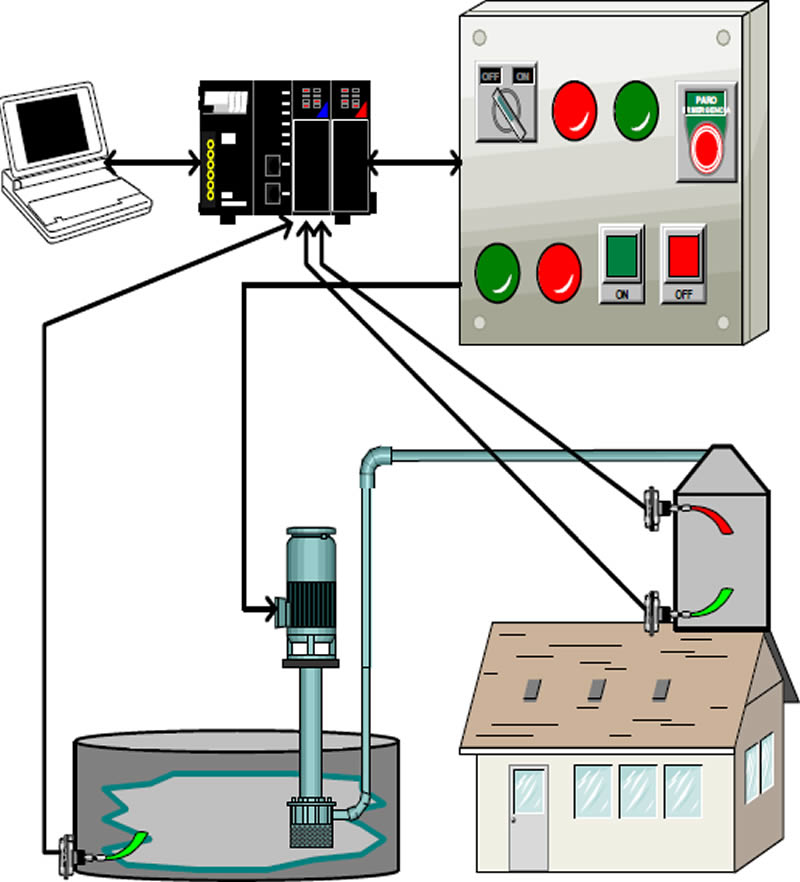
Fig.3 Sistema de llenado de tanque
Figura 3 muestra el sistema de llenado de un tanque. El sistema tiene las siguientes especificaciones formales:
La Tabla 5 muestra el direccionamiento de las variables en LD.
Tabla 4. Definición de LDPN
| Dirección | Tag | Descripción |
| %I1 | HS | Paro de emergencia |
| %I2 | C_LSL | Sensor bajo nivel cisterna |
| %I3 | MAN_AUT | Selector manual – automático |
| %I4 | PB_RUN | Botón de arranque |
| %I5 | PB_STOP | Botón de paro |
| %I6 | TQ_HSL | Sensor alto nivel tanque |
| %I7 | TQ_LSL | Sensor bajo nivel tanque |
| %M1 | AUX_MAN | Auxiliar modo manual |
| %M2 | AUX_AUT | Auxiliar modo automático |
| %Q1 | MOTOR | Motobomba |
| %Q2 | XL_MAN | Indicador modo manual |
| %Q3 | XL_AUT | Indicador modo automático |
| %Q4 | XL_MOTOR | Indicador motobomba |
La Figura 4 muestra el algoritmo de control del sistema de llenado de tanque. Las protecciones de paro de emergencia (HS) y de bajo nivel de la cisterna (C_LSL) abren el circuito para las dos primeras líneas de control. Con la señal del selector del modo de operación del sistemas se habilita solo una línea de control a la vez, ya que solo puede tener un estado; energizado habilita la línea de control manual y desenergizado habilita la línea de control automático. La primera línea de control es para el funcionamiento manual, contempla los botones instantáneos de arranque y paro de la motobomba (PB_RUN y PB_STOP, respectivamente). La segunda línea de control es para el modo automático y contempla la señal de bajo nivel del tanque (TQ_LSL) para arranque de la motobomba. Ambas líneas de control tienen la señal de tanque lleno (TQ_HSL) para detener la motobomba. La tercera para detener la motobomba en un cambio de selección y las siguientes son de indicación del estado de operación del sistema.
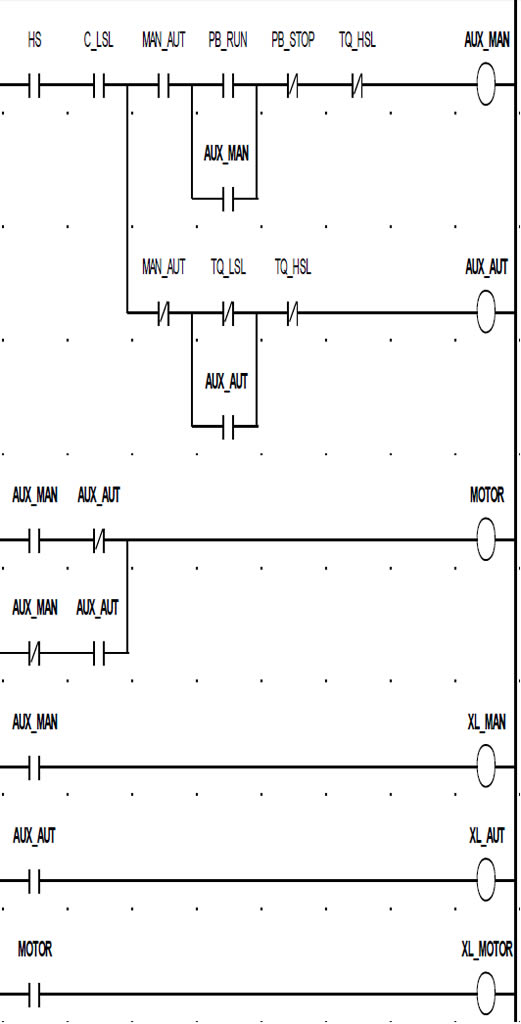
Fig. 4. LD sistema de llenado de tanque.
Figura 5 muestra la LDPN correspondiente al algoritmo de control de la Figura 4. La estructura de la red permite observar las señales de entrada – algoritmo de control – salidas del sistema.
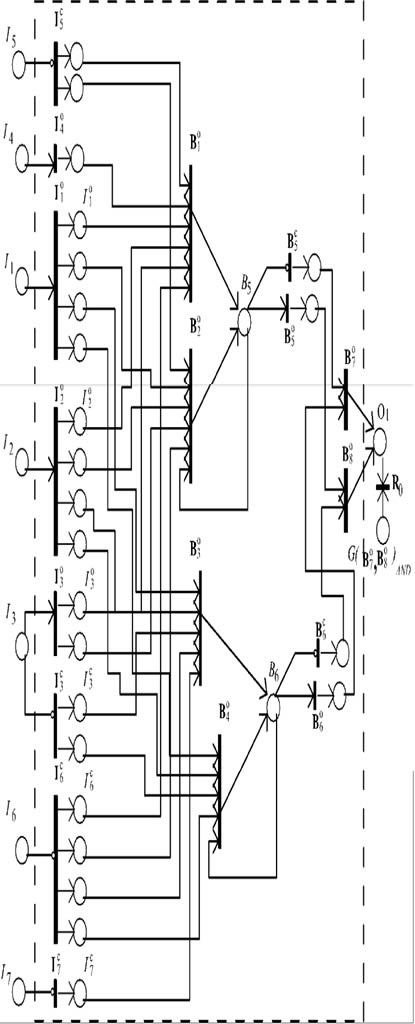
Fig. 5. LDPN sistema de llenado de tanque.
La transformación de algoritmos de control desarrollados en LD a PN permite utilizar las herramientas gráficas y matemáticas de la propia teoría de redes de Petri, lo cual ayuda a validar o verificar el comportamiento del sistema. El LDPN es un enfoque que considera los tipos de contactos NO y/o NC de una señal de entrada y/o salida física, así como, de las señales internas de memoria. Considera el comportamiento de energizar y/o desenergizar bobinas que están en función del proceso. La estructura gráfica de la LDPN permite identificar las señales físicas y de memoria de forma rápida.
da Silva Oliveira, E.A., da Silva, L.D., Gorgonio, K., Perkusich, A., Martins, A.F. (2011) Obtaining formal models from ladder diagrams. 9th IEEE International Conference on Industrial Informatics (INDIN), 26–29, 796–801.
Frey, G. (2000) Analysis of Petri nets based control algorithms: Basic properties. Proceedings of ACC, 3172-3176.
International Electrotechnical Commision, IEC 61131–3 (2003) Programmable Controllers: Programming Languages, International standard, second edition.
Lee, J., Lee, J.S. (2009) Conversion of ladder diagram to petri net using module synthesis technique. International Journal of Model and Simulation, 29(1), 79–88.
Murata, T. (1989), Petri nets: properties, analysis and applications. Proc. IEEE 77(4), 541-580.
Petruzella, F. D. (2011) Programmable Logic Controllers, fourth edition, New York, Mc Graw Hill.
Quezada, J. C., Medina, J., Flores, E., Seck-Tuoh, J. C., Hernández, N. (2014) Formal design methodology for transforming ladder diagram to Petri nets, International Journal of Advanced Manufacturing Technology, 73, 821-836
Thapa, D., Dangol, S., Wang, G.N. (2005), Transformation from petri nets model to programmable logic controller using one-to-one mapping technique. International conference on computational intelligence for modelling, Control and automation, 2005 and international conference on intelligent agents, Web technologies and internet commerce, vol 2, 228–233.
Uzam, M., Jones, H. (1998) Discrete event control systems design using Automation Petri Nets and their ladder diagram implementation. International Journal of Advanced Manufacturing Technology. Vol. 14, No. 10, 716-728.
Xuekum, C., Lilian, L., Pengfei, Q. (2012) Method for translating ladder diagram to ordinary Petri nets. 51st IEEE Conference on Decision and Control.
[a] José Carlos Quezada es Ingeniero en Electrónica por el Instituto Tecnológico de Lázaro Cárdenas, Maestro en Ciencias en Ingeniería Mecatrónica por el Tecnológico de Estudios Superiores de Ecatepec, y actualmente realiza estudios de Doctorado en Ingeniería Industrial en la Universidad Autónoma del Estado de Hidalgo. Se ha desempeñado laboralmente en FERTINAL SA de CV, CFE, SICARTSA y actualmente es Profesor Investigador de la Escuela Superior de Tizayuca-UAEH. Sus áreas de interés son la automatización de procesos industriales con tecnología PLC y PAC, así como, el desarrollo de HMI.
[b] Joselito Medina recibió el grado de Ingeniero en Computación por parte de la Universidad Autónoma de Guerrero en el año de 1997. En el 2002 recibió el grado de Maestro en Ciencias con especialidad en Computación, y en el 2005 el grado de Doctor en Ciencias con especialidad en Computación, ambos grados fueron otorgados por el Centro de Investigación y de Estudios Avanzados del Instituto Politécnico Nacional (CINVESTAV – IPN). Actualmente se encuentra laborando en el Área Académica de Ingeniería de la Universidad Autónoma del Estado de Hidalgo como Profesor-Investigador. Las líneas de investigación que cultiva incluyen teoría de Redes de Petri, bases de datos activas, simulación de eventos discretos y lenguajes de programación.
[c] Juan Carlos Seck-Tuoh recibió los grados de Maestría y Doctorado en Ciencias en Ingeniería Eléctrica opción Computación por parte del Centro de Investigación y de Estudios Avanzados del Instituto del Politécnico Nacional en México, D.F., en 1999 y 2002 respectivamente. Actualmente es Profesor Investigador del Centro de Investigación Avanzada en Ingeniería Industrial en la Universidad Autónoma del Estado de Hidalgo, México. Sus intereses de investigación incluyen teoría de autómatas celulares y sus aplicaciones, computación evolutiva y simulación.
[d] Ernesto Flores es Doctor y Maestro en Ciencias en la especialidad de Control Automático por el Centro de Investigación y de Estudios Avanzados, CINVESTAV-IPN, de la Ciudad de México; Ingeniero en Aeronáutica por el Instituto Politécnico Nacional, de la Ciudad de México. Sus temas de interés incluyen el control de sistemas electromecánicos, servomecanismos, robótica, y microcontroladores. Se ha desempeñado como profesor de universidad en las áreas de teoría de control y matemáticas. Actualmente es profesor investigador en la Universidad Autónoma del Estado de Hidalgo, México.
[e] Alonso Solís es Ingeniero en Sistemas Computacionales por el Instituto Tecnológico de Pachuca y Maestro en la Administración de las Telecomunicaciones por el Instituto Tecnológico y de Estudios Superiores de Monterrey Campus Hidalgo. Actualmente es Profesor Investigador de la Escuela Superior de Tizayuca - UAEH y tiene como áreas de interés el procesamiento digital de imágenes y programación de dispositivos reconfigurables.
[*] Autor de correspondencia: jcarlos@uaeh.edu.mx
[a],[d],[e] Universidad Autónoma del Estado de Hidalgo, Escuela Superior de Tizayuca, Carr. Tizayuca - Pachuca Km 2.5, Tizayuca Hidalgo.
[b],[c] Área Académica de Ingeniería, Instituto de Ciencias Básicas e Ingeniería, Universidad Autónoma del Estado de Hidalgo, Carr. Pachuca Tulancingo Km 4.5, Ciudad del Conocimiento, Col. Carboneras, C. P. 42184, Pachuca de Soto, Hgo., México.