En este trabajo de investigación se presenta el algoritmo de búsqueda gravitatoria (Gravitational Search Algorithm GSA) para la estimación de parámetros del motor de inducción trifásico jaula de ardilla, requeridos en el modelo del circuito equivalente en estado estacionario. Este método emplea parte de la formulación de las leyes de la gravitación para realizar una búsqueda en el espacio de posibles soluciones y crear partículas cuyas masas aumentan en las zonas cercanas a las soluciones prometedoras, esta característica ha permitido que el GSA tenga un mejor desempeño con respecto al PSO y Genético en los aspectos de iteraciones; además los resultados que se obtienen son similares a los que se presentan en otras publicaciones.
Palabras clave: Masa, fuerza, estimación, modelo matemático.
This paper presents the Gravitational Search Algorithm (GSA) to get parameters of induction motor that are required in equivalent circuit of steady state model. The GSA uses a part of gravitational laws to guide the search toward feasible spaces and create heavy mass close to optimal solution. This feature has enabled at GSA be a better about performance compared with PSO and Genetic and the results obtained are similar to those presented in other publications.
Keywords: Mass, force, estimation, mathematic model.
La solución a problemas de optimización de parámetros sigue vigente debido en parte a la técnica aplicada para resolverlo satisfactoriamente. En Jangjit y Laohachai (2009) se propone la utilización de un algoritmo genético, como estrategia en la búsqueda de los parámetros óptimos de un motor de tres fases. Además, la estrategia de cúmulo de partículas también se ha utilizado en la determinación de parámetros para el caso de motores de inducción (Sakthivel et al., 210). Dentro del conjunto de algoritmos desarrollados para este tipo de problemas, el algoritmo de búsqueda gravitacional (GSA, por sus siglas en inglés) relativamente recientemente, está inspirado en las leyes de la gravitación formuladas por Newton.
Este algoritmo se presentó en 2009 por Esmat Rashedi, Hossein Nezamabadi-pour y Saeid Saryazdi.
Para el funcionamiento del algoritmo, este no considera la distancia entre las masas que son partes de la modelación de la ley de gravitación; se basa sobre la interacción entre masas. (Rashedi et al., 2009)
La población se define como un conjunto de agentes de búsqueda, que interactúan entre ellos por la fuerza de gravedad, en otras palabras, cada a agente se le considera una partícula con determinada masa que experimenta atracción hacia otros agentes.
La fuerza gravitacional crea un momento-mecánico global donde todos los objetos se mueven hacia otros objetos con masas con mayor peso que están cerca de algún punto de solución, el movimiento de las masas más pesadas se produce lentamente para garantizar un ritmo de explotación del algoritmo.
En el algoritmo, el agente tiene cuatro parámetros los cuales son: posición, masa de inercia, masa gravitacional activa y masa gravitacional pasiva, estos parámetros proporcionan los elementos para obtener la aceleración.
La posición de la masa representa la solución del problema, donde las masas gravitacionales y de inercia son determinadas por la función objetivo.
El algoritmo navega ajustando la aceleración gravitacional y las masas de inercia mientras que cada masa presenta un óptimo de solución en el espacio de búsqueda.
Paso 1: El algoritmo de búsqueda gravitacional se inicia con la asignación de algunos valores requeridos, en este trabajo se presentan los que se han asignado en la implementación, como el tamaño de población de agentes N = 50, máximo de iteraciones maxit = 500, límites para el espacio de búsqueda: inf = [0 0 0 50]; sup = [10 10 10 100]; dimensionamiento del problema: dim = 4; y un vector inicial de velocidades cero VNxdim.
Paso 2, se propone un arreglo matricial de agentes de la forma de la ec. 1.
Donde cada agente se determina aleatoriamente dentro del espacio permitido en la ec. 2.

Paso 3, se identifican a los agentes y sus componentes que resultaron fuera del espacio de búsqueda EBúsq (definido por los límites inferior y superior) y se generan nuevamente solo los componentes citados dentro del espacio permitido. En la primera iteración todos los agentes y sus componentes se encuentran en el espacio permitido y en el resto de las iteraciones puede ocurrir que algunos agentes estén fuera.
La incorporación de agentes y sus componentes se hace mediante el criterio de la expresión 3.

Paso 4, se evalúan los agentes en la función objetivo y se obtiene el de menor error (mejor fitness)

Paso 5, Se calcula un vector de masa M, para este vector es necesario obtener el mínimo valor de aptitud Aptmin y el máximo valor de aptitud Aptmax; si los valores de aptitudes son iguales, el vector de masa es un arreglo de “unos” ec. (5).
En caso contrario el vector de masa se obtiene con la expresión 6.
Dondeaptitudi es el valor alcanzado por cada agentei. El vector de masa es normalizado ec. 9
Paso 6, La constante de gravedad G es inicializada en el principio y se va reduciendo al pasar las iteraciones para controlar la precisión en la búsqueda; se calcula mediante el valor actual de la iteración ite y el máximo de iteraciones maxite y la asignación de dos constantes a=20 y G0 =100 propuestas por el autor del algoritmo para producir una atenuación de la constante G, ec (10)

Paso 7, Para calcular la aceleración en el campo gravitacional a se requiere de otros valores para obtenerla; primero se propone crear un control de kmejor agentes; las expresiones (11) y (12) muestran la manera de obtener el valor de kmejor en función de cada iteración ite y del número de agentes N:


Donde a Pjef se le asigna el valor de 2% porque en la última iteración solo este porcentaje de los agentes ejercen una fuerza sobre los demás (Rashedi et al., 2009).
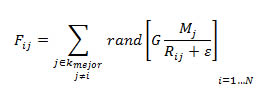
Rashedi et al. (2009) proponen para determinar la fuerza entre los agentes: la sumatoria (correspondiente a los agentes j que se encuentren es los kmejor) del producto entre los elementos de un valor aleatorio , la constante de gravedad, la diferencia entre los agentes i,j y el producto cruz entre las masa gravitacionales activas y pasivas dividido entre la distancia entre los agentes involucrados, como se presenta en la ec. 13.

El control de kmejor tiene valores con perfil descendente en proporción inversa a ite (de Na 1). kmejor proporciona los primeros k-agentes con mejor aptitud y mayor masa.
Maj (masa gravitacional activa) es la medida de la fuerza del campo gravitacional correspondiente a un cuerpo en particular.
Mpi (masa gravitacional pasiva) es la medida de la fuerza de la interacción de un objeto con el campo gravitacional.
En la implementación del algoritmo, Rashedi et al. (2009) realizan una aproximación del producto entre las masas gravitatorias activas y pasivas por la masa obtenida en 8 y 9; ec. 14.

Rij es la distancia euclidiana entre los agentes i, j y  es una constante pequeña (2-52) que evita una indeterminación cuando los agentes están pegados. La ec. 15 es la que se implementa en el algoritmo.
es una constante pequeña (2-52) que evita una indeterminación cuando los agentes están pegados. La ec. 15 es la que se implementa en el algoritmo.
La aceleración es una matriz Nxdim donde se especifica la aceleración para cada componente de cada agente y se obtiene con el producto de la matriz de fuerzas Fij y la constante de gravitación G ec. 15
Paso 8, Con los valores de los agentes, aceleraciones y velocidades y una matriz de números aleatorios, se obtiene una nueva generación de agentes y valores de velocidad ecs.(16) y (17).


Los números aleatorios requeridos en los pasos 7 y 8 están en el intervalo [0,1] y tienen una distribución uniforme.
Paso 9, Se verifica si se han realizado las iteraciones planeadas (itemax), si no cumple se regresa al paso 3, y si cumple se presentan los resultados y se termina el algoritmo.
El diagrama de flujo se muestra a continuación.

Figura 1. Flujo de operaciones del algoritmo GSA.
El modelo matemático se determina a partir del circuito equivalente del motor de inducción mostrado en la figura 2.
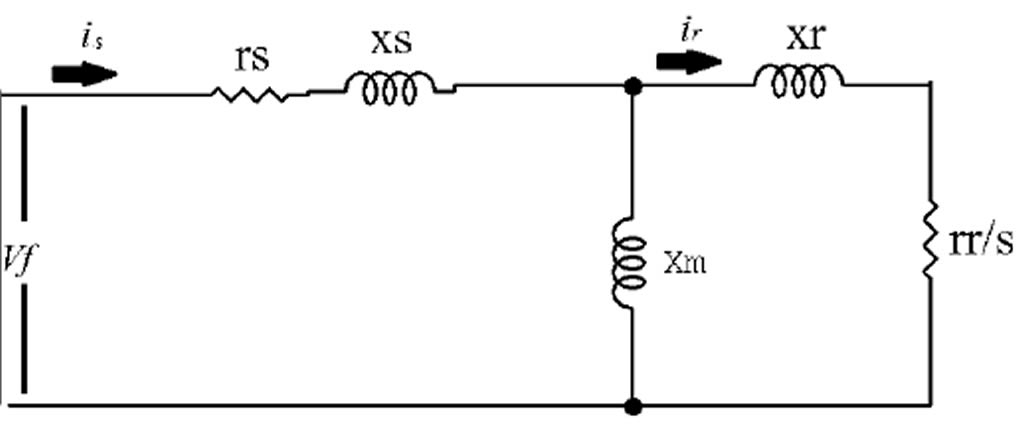
Figura 2. Circuito equivalente del motor de inducción (Chapman, 2011).
El voltaje de fase vf se aplica a cada uno de los devanados del circuito y como los devanados son prácticamente idénticos, solo es necesario analizar un solo circuito para los 3 devanados.
Las literales xs y rs corresponden a los valores de resistencia y reactancia del estator, estos valores pueden ser obtenidos con instrumentos de laboratorio; y los valores de reactancia magnetizante xm y resistencia y reactancia de rotor rr y xr son difíciles de obtener en pruebas de laboratorio y además carecen de buena precisión.
1. Par Electromagnético
El par electromagnético es el momento torsor que el motor eléctrico es capaz de desarrollar para mover la carga mecánica acoplada a la flecha. Para el motor de inducción el par está definido por la expresión 18.

Se enfatiza que el par eléctrico y la corriente de rotor ir están en función del deslizamiento s. La corriente de rotor se obtiene del circuito de la figura 2 y resulta en la expresión 19.

Se tiene que Zp es la impedancia equivalente en el lado del rotor del circuito de la figura 2 y se obtiene en la ecuación 20.
Y la corriente del estator is queda determinada por la expresión 21 (Chapman, 2011).

2. Deslizamientos
El deslizamiento es la diferencia de la velocidad angular de la flecha del motor y la velocidad síncrona del campo giratorio del estator. Para este estudio se trabajó con el deslizamiento de arranque sA = 1, que ocurre en el momento que se energiza al motor y este comienza a girar; el deslizamiento a plena carga spc, que es proporcionado por el fabricante del motor, y el deslizamiento cuando el par es máximo spm; este valor se determina mediante la impedancia de Thevenin correspondiente al rotor y la reactancia magnetizante, ec. (22)

Entonces el deslizamiento a par máximo se obtiene con la expresión 23.

Note que el valor de la parte imaginaria de la impedancia de Thevenin y la reactancia de rotor se operan como valores reales.
La función objetivo o también llamada función costo se construye empleando el modelo matemático del motor y de los valores de referencia de proporciona el fabricante; estos valores son: el par de arranque TAF, el par a plena carga TpcF y el par máximo TMF.
Los pares TAC, TpcC y TMC se obtienen con los valores de deslizamiento correspondientes, ecs. 24, 25 y 26.
Los índices se refieren a los valores de fábrica “F” y los valores calculados “C”.
El factor de potencia a plena carga fppc se obtiene con el coseno del ángulo de la corriente del estator is como se presenta en la expresión 27.

El factor de potencia a plena carga es otro elemento que el fabricante proporciona y además se puede calcular.
El factor de potencia cuando el deslizamiento tiende a ser cero es cero también, ec. (28). (Lara et al., 2014)

Ahora para efectos de cálculo, se emplea un deslizamiento reducido, aproximadamente sr = 0.001; entonces el factor de potencia cuando el deslizamiento tiende a cero, se emplea la expresión 27 y el valor de sr.
Los costos de cada una de las partes de la función objetivo son:

La función objetivo se compone de las expresiones 28, 29, 30 31 y 32, ec. 33

Entonces el problema de optimización es determinar los valores adecuados de los parámetros del circuito equivalente de la figura 2 para determinar el mínimo de la expresión 33.

El motor de inducción asíncrono jaula de ardilla que se estudia es de 5 Hp, 400 volts, 2 polos y 50 Hz; los datos adicionales que proporciona el fabricante se presentan en la tabla 1
Tabla 1 datos adicionales proporcionados por el fabricante.
| TA | Tpc | TM | fppc | spc |
| 15 Nm | 25 Nm | 43 Nm | 0.8 | 0.007 |
Los valores estimados se han obtenido mediante la ejecución del algoritmo GSA 50 veces, grabando los resultados de cada ejecución y seleccionando a la mejor estimación; estos valores se presentan en la tabla 2.
Tabla 2, Valores estimados para el motor de inducción 5Hp mediante GSA.
| Rr | rs |
| 0.0000245 | 2.1852 |
| xs=xr | xm |
| 5.7401 | 90.6089 |
Los parámetros estimados se sustituyen en el modelo matemático y se presenta su comportamiento haciendo variar al deslizamiento entre los valores permitidos de 0 a 1. En la figura 3 se presenta la gráfica de par-deslizamiento y en la figura 4 la gráfica factor de potencia vs. deslizamiento.
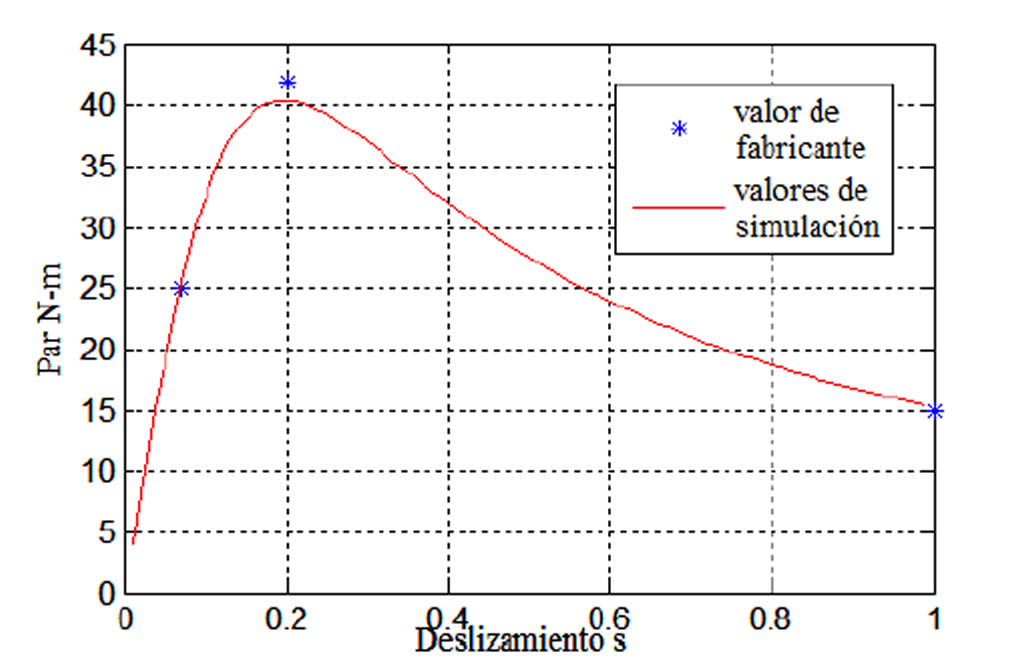
Figura 3. Par-deslizamiento del motor de inducción.
Tabla 3, valores del porcentaje de error en los pares y factor de potencias.
| err Tpc | err TA |
| 2.39 | 1.864 |
| err TM | err fppc |
| 3.734 | 0.9487 |
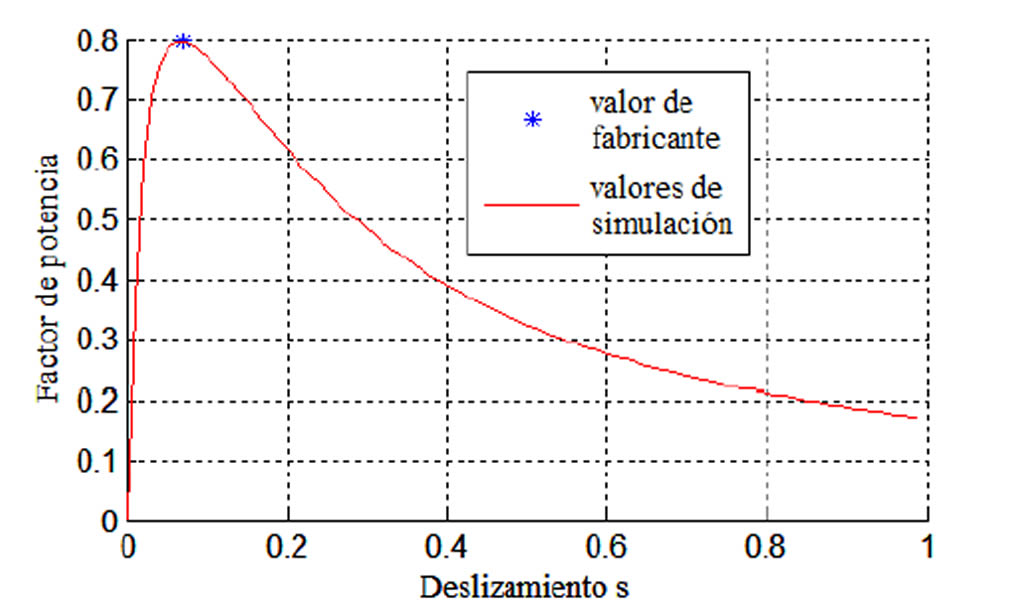
Figura 4. Gráfica del factor de potencia vs. deslizamiento.
El algoritmo de búsqueda gravitacional desarrolla una exploración satisfactoria en el espacio permitido de posibles soluciones y realiza una estimación de parámetros del motor de inducción válidos.
Las gráficas en las figuras 3 y 4, generadas con el modelo del motor de inducción y los valores sustituidos por los parámetros estimados por el GSA muestran una proximidad satisfactoria con los valores de referencia que proporciona el fabricante.
Chapman, S. J. (2011) Máquinas Eléctricas. McGraw-Hill.
Jangjit, S., Laohachai, P. (2009). Parameter estimation of three-phase induction motor by using genetic algorithm. Journal of Electrical Engineering & Technology, 4( 3), 360-364.
Lara, H., Hernández, N. (2014). Conformación del algoritmo CMA-es para la estimación de parámetros del motor de inducción asíncrono trifásico. Reunión de Verano de Potencia 2014 IEEE. Acapulco Guerrero.
Rashedi, E., Nezamabadi-pour, H., Saryazdi, S. (2009) GSA: A Gravitational Search Algorithm, Information Sciences, 179(13), 2232-2248, ISSN 0020-0255, http://dx.doi.org/10.1016/j.ins.2009.03.004.
Sakthivel, V.P., Bhuvaneswari, R., Subramanian, S. (2010 ). An improved particle swarm optimization for induction motor parameter determination. International Journal of Computer Applications, 1, (2), 62-67.
[a] Herbert Lara Ordaz, recibió el grado maestría en ciencias computacionales en el Centro de Investigación en Tecnologías de Información y Sistemas de la UAEH. En 2011 inició sus estudios de doctorado en ciencias en ingeniería industrial en el Área Académica de Ingeniería del ICBI en la UAEH.
[b] Norberto Hernández Romero, obtiene el grado de Maestría en Ciencias en Ingeniería Eléctrica por el Instituto Tecnológico de la Laguna, México, en 2001, y el grado de Doctor en Ciencias en Ingeniería Industrial por la Universidad Autónoma del Estado de Hidalgo, en 2009. Actualmente es profesor-investigador de tiempo Completo, en la Universidad Autónoma del Estado de Hidalgo, México.
[c] Juan Carlos Seck Tuoh Mora, recibió los grados de Maestría y Doctorado en Ciencias en Ingeniería Eléctrica opción Computación por parte del Centro de Investigación y de Estudios Avanzados del Instituto del Politécnico Nacional en México, D.F., en 1999 y 2002 respectivamente. Actualmente es Profesor Investigador del Centro de Investigación Avanzada en Ingeniería Industrial en la Universidad Autónoma del Estado de Hidalgo, México. Sus intereses de investigación incluyen teoría de autómatas celulares y sus aplicaciones, computación evolutiva y simulación.
[d] Joselito Medina Marín, recibió el grado de Ingeniero en Computación por parte de la Universidad Autónoma de Guerrero en el año de 1997. En el 2002 recibió el grado de Maestro en Ciencias con especialidad en Computación, y en el 2005 el grado de Doctor en Ciencias con especialidad en Computación, ambos grados fueron otorgados por el Centro de Investigación y de Estudios Avanzados del Instituto Politécnico Nacional (CINVESTAV – IPN). Actualmente se encuentra laborando en el Área Académica de Ingeniería de la Universidad Autónoma del Estado de Hidalgo como Profesor-Investigador. Las líneas de investigación que cultiva incluyen teoría de Redes de Petri, bases de datos activas, simulación de eventos discretos y lenguajes de programación.
[*] herbertlara@hotmail.com
[a] Área académica de Computación, Universidad Autónoma del Estado de Hidalgo.
[a],[c],[d] dÁrea Académica de Ingeniería, Instituto de Ciencias Básicas e Ingeniería, Universidad Autónoma del Estado de Hidalgo, Carr. Pachuca Tulancingo Km 4.5, Ciudad del Conocimiento, Col. Carboneras, C. P. 42184, Pachuca de Soto, Hgo., México.