La evaluación de un sistema integral de generación de energía eléctrica obtenida a través de un generador undimotriz es el principal objetivo resuelto en este trabajo. Se evaluaron dos turbinas Kaplan con el fin de producir energía mecánica derivada de los movimientos del agua, los cuales serán convertidos a energía eléctrica, se monitoreará la producción total de energía eléctrica. Cada turbina se construyó utilizando un equipo de impresión tridimensional utilizando como material de construcción al polímero conocido como Acrilonitrilo Butadieno Estireno (ABS). Se acopló a cada una de las turbinas un motor de corriente directa que operó en forma de generador eléctrico síncrono. La señal oscilante de voltaje determinada en cada uno de los motores y fue procesada mediante un convertidor de corriente alterna a corriente directa. Para evaluar los diferentes arreglos de turbinas, se desarrolló un simulador de generación de olas basado en un contenedor de 100 cm de largo x 70 cm de ancho x 30 cm de alto acoplado a un actuador lineal que fue controlado para crear diferentes patrones de oleaje. Los resultados obtenidos al ajustar la distribución de las turbinas mostraron un incremento en la potencia eléctrica producida de al menos un 50% entre ambas configuraciones. El sistema desarrollado puede utilizarse para evaluar diferentes configuraciones de las turbinas de Kaplan en la producción de energía que pueden incluir el ajuste de la operación eléctrica de la turbina dependiendo del patrón de oleaje.
Palabras clave: Energía undimotriz, Turbinas de Kaplan, Energía eléctrica, Simulador de oleaje
The evaluation of an integral system of generation of electric energy obtained through a wave generator is determined in this main objective of this work. Two Kaplan turbines were evaluated in order to produce mechanical energy derived from water flows, which will be converted to electrical energy, the total production of electric energy will be monitored. Each turbine was built using a three-dimensional printer, the material of construction was a polymer known as acrylonitrile butadiene styrene (ABS). Each of the turbines was coupled to an engine of direct current that works as a synchronous generator. The oscillating voltage signal was determined in each of the engines and was processed in an alternating current to direct current converter. For the evaluation of the different arrays of turbines, a wave generation simulator was developed, based on a container of 100 cm long x 70 cm wide x 30 cm high attached to a linear actuator that was controlled to create different patterns of waves. The results were obtained after changing the distribution of the turbines in order to increase the production of energy at least in 15%. The developed system can be used to evaluate different configurations of the Kaplan turbines; as a result energy production may vary depending on the wave pattern.
Keywords: Wave energy, Kaplan turbines, Electrical energy, Waving simulator
A partir de la Revolución Industrial, las sociedad es contemporáneas han estado en la búsqueda constante de fuentes de energía que puedan considerarse como alternativas a los combustibles fósiles(Díaz Velilla, 2015). El número de opciones disponibles para generar energía por medios renovables van desde la energía solar hasta el uso de biomasa como fuente de calor(Domínguez Gómez, 1995), (Posso, 2002). Entre estas opciones, la energía producida por el movimiento del agua en los océanos parece una opción prometedora con altos índices de eficiencia (Aires, 2011) y grandes cantidades potenciales de watts que pueden ser producidos de forma continua (Pelissero, Haim, Oliveto, Galia, & Tula, 2011). Este tipo de tecnologías se han desarrollado desde hace tres siglos, pero no fue sino hasta hace unos cuantos años que se han reconsiderado como una opción realista y viable de producción energética (Boehlert & McMurray, 2007).
La energía undimotriz ha sido considerada como una de las fuentes más prometedoras que existen hoy en día(Libertia, Carillo, & Sannino, 2013), debido a que este tipo de energía está disponible el 100% del tiempo dado que, en realidad, el movimiento de los cuerpos de agua oceánicos no se detiene(Roldán Viloría, 2008). Además, dentro de las tecnologías que existen para producir energía a partir de los océanos, ésta es la de menor impacto ambiental(Salter, 1974). De hecho, se ha establecido que aún faltan estudios sobre el impacto que podría tener la instalación de generadores de energía undimotriz sobre la vida marina (Shepparda, Dixon, Gourlay, Shepparda, & Payet, 2005).
Algunos de los efectos negativos sobre el ambiente que se relacionan con la implementación de las granjas undimotrices está el impacto a la cantidad de peces que viven cerca de las superficies por el cambio de oleaje (Mollison, 1986) y a la reducción de alimento (algas) en las superficies cercanas (Mollison, 1980). Dentro de los efectos positivos que se les atribuyen a las granjas generadoras de energía undimotriz están el romper las olas, reducir la erosión en las costas (Alevison & Gorham, 1989) y algunos fabricantes atribuyen a estos dispositivos la capacidad para albergar vida marina, ya que actúan como arrecifes artificiales (Grossman, Jones, & Seaman, 1997), (Inger, y otros, 2009). A pesar de todas las ventajas que tiene esta técnica de producción de energía renovable, el costo de implementación y mantenimiento de este tipo de tecnología hace difícil su implementación a escala industrial (Hewitt, 2012) , (Mueller & Wallace, 2008).
A finales del siglo XVIII, Monsieur Girard (Clement, y otros, 2002) diseñó y evaluó el primer sistema enfocado en la obtención de energía undimotriz del que se tenga registro. Después de este desarrollo, muy pocos avances en esta tecnología se hicieron en el periodo que comprende de 1800 y antes de 1960 (López, Andreu, Ceballos, & Martínez de Alegría , 2013).Además, en los estudios realizados hasta el momento, México no cuenta con ninguna central eléctrica que aproveche la energía proveniente de los mares, considerando que, a partir de la reforma energética del año 2013, México ha iniciado el desarrollo de políticas específicas para la energía undimotriz, debido a que ha sido considerada una de las fuentes de energía renovable más prometedoras(INEGI, 2006).
Cabe notar que los generadores de energía undimotriz utilizan mecanismos de conversión electromecánica basados en elementos hidráulicos, así como elementos rotatorios con aspas flexibles(Falnes J. , 2007). Cualquiera de estos dos métodos de conversión emplea una dirección preferencial del movimiento de las corrientes marítimas y/o del oleaje (Burman & Walker, 2009). Existen dispositivos electromecánicos actualmente usados para la conversión de energía cinética o potencial a energía eléctrica, en función al caudal y la altura que se tenga. Entre los más importantes encontramos la turbina de Pelton, turbina de Francis y turbina de Kaplan. En particular, la turbina de Kaplan es adecuada para saltos pequeños con caudales de agua variables, la turbina de Francis tiene un aprovechamiento mejor para saltos más elevados pero con caudales menos variables y la turbina de Pelton es recomendable para grandes saltos, sin importar el caudal que se tenga (André Stople R. , 2011).
Por lo anteriormente expuesto, el objetivo del trabajo consiste en diseñar e implementar un generador undimotriz a través de un simulador de oleaje marino mediante un arreglo de cuatro turbinas de Kaplan dispuestas en diferentes orientaciones con la finalidad de generar energía eléctrica para comprobar que este tipo de fuente de energía autorrenovable puede producir la suficiente cantidad de energía eléctrica (González Romero, 2009), (Guiberteau, Liu, & Kozman, 2012).
La metodología que da soporte al desarrollo del sistema alternativo de generación de energía fue propuesta para realizarse en cuatro fases. La primera consistió en realizar el diseño y construcción de un dispositivo electrohidráulico que fuese capaz de aprovechar la energía del agua teniendo caudales variables y saltos de poca altura, utilizando las turbinas de Kaplan como elemento transductor. Para su construcción, las turbinas fueron creadas por medio de la tecnología de impresión tridimensional empleando el polímero Acrilonitrilo Butadieno Estireno (ABS) como elemento estructural principal. La segunda fase se centró en diseñar y construir un acoplamiento electromecánico que permitiera producir energía eléctrica a partir del movimiento mecánico realizado por las turbinas de Kaplan, lo que consistió en un sistema de rotación de baja fricción que proporcionara un libre movimiento a las turbinas dentro del agua (Masuda, 1971). Este sistema de rotación se constituyó a partir de un motor de corriente directa (CD) que operó en forma de generador mecánico de energía. La tercera etapa estuvo enfocada en realizar el sistema electrónico que consistiera en trasformar la corriente alterna (CA) a CD, mediante un convertidor CA/CD asociado a un filtro pasa-bajas de primer orden, encargado de discriminar los rizos de la señal de voltaje producida. La cuarta etapa se enfocó en la construcción de un sistema simulador que produce oleaje, constituido por un contendor de agua de cristal, una base de madera como soporte, una plataforma móvil de acero (ambas en forma de cajón) con 4 rodamientos y un impulsor mecánico, sirviendo éste, como generador de movimientos de oleaje dentro del simulador. La cuarta etapa dio como resultado, el generador de energía undimotriz.
Las turbinas de Kaplan son aquellas que se pueden usar en caídas de agua medias y bajas con caudal variable. Estas turbinas se instalan de manera vertical, debido a que son turbinas más eficientes en reacciones de flujo axial, es decir, la fuerza contenida dentro del agua es direccionada al rotor, aprovechando en gran porcentaje el movimiento mecánico de la turbina.
Este tipo de turbina se propuso debido a que el simulador que se plantea realizar carece de altura, sin embargo, el caudal que se generara dentro de éste será el necesario para efectuar movimientos rotarios, ya que las olas generadas por el actuador lineal y la colocación de bombas de agua dentro del simulador lograran producir el suficiente movimiento mecánico para dichas turbinas.
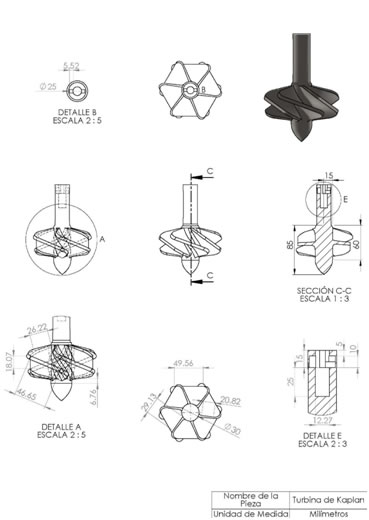
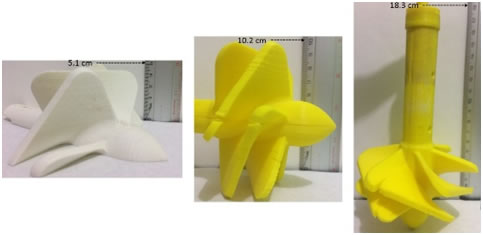
El diseño de la turbina de Kaplan propuesta para la generación de movimiento mecánico dentro del simulador se observa en la Figura 1, tuvo una altura de 18.3 cm de largo con 6 aspas distribuidas homogéneamente, un diámetro donde las aspas ocupan mayor espacio de 10.2 cm con una altura de 8.5 cm y un poste con un diámetro de 2.5 cm y altura de 10 cm.
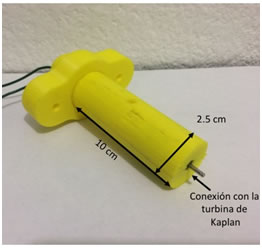
Cada una de las turbinas distribuidas en el sistema de generación eléctrica undimotriz se acopló a un motor de corriente directa como se ilustra en la Figura 2. El motor trabajó en forma de generador de energía con una operación nominal de entre los 3 y 12V, con una corriente sin torque de 70mA y una corriente máxima a 800mA alcanzando 11,500 revoluciones por minuto a los 6V.

Para lograr que la energía mecánica de movimiento producida por la turbina de Kaplan se transmita con la mayor eficiencia hacia el motor de DC, se diseñó un sistema de rotación de bajo nivel de fricción logrando la instrumentación de un rodamiento cilíndrico tangencial (Figura 3).
El sistema de acoplamiento eléctrico incluyó una cobertura cilíndrica que aseguró la posición vertical del cuerpo principal de la turbina. Este esquema mecánico orienta la fuerza del agua en dirección de movimiento de las corrientes producidas por el simulador propuesto en este proyecto.

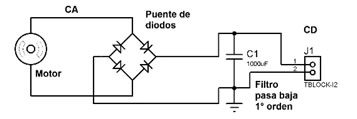
Dado que el sistema de producción de energía emplea motores DC que producen un voltaje oscilante no regular (CA), se debe realizar un convertidor CA/CD como el que se muestra en la Figura 4, basado en un circuito simple tipo puente de diodos asociado a un filtro pasa-bajas de primer orden, es decir, el movimiento que produzca la turbina de Kaplan dentro del simulador de olas es considerado por el generador de energía como corriente alterna, al pasar la energía del generador por el puente de diodos, éste se encarga de discriminar las partes positivas y negativas permitiendo quedarse solo con la parte positiva del voltaje de entrada, para después ser filtrado eliminando los risos restantes obteniendo corriente directa.
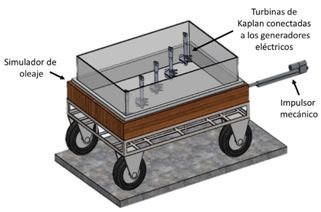
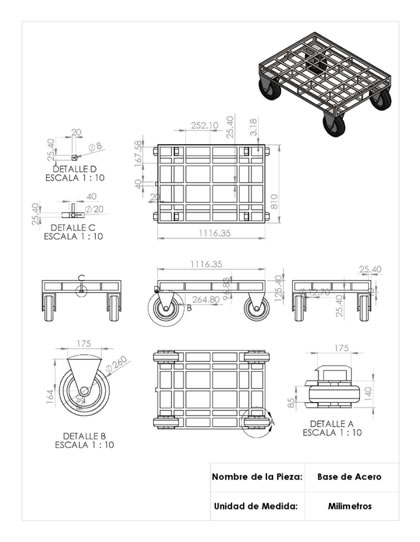
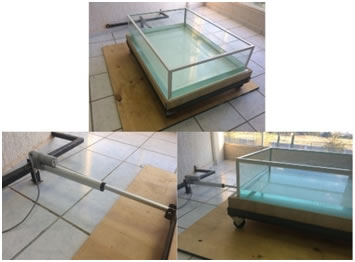
En la Figura 5 se muestra el diseño integrado del simulador para la generación de energía undimotriz, el cual consta de un contendor de agua de cristal de: 100 cm de largo x 70 cm de ancho x 30 cm de alto, una base de madera de triplay y una plataforma móvil de acero en forma de cajón con 4 rodamientos de 3 pulgadas de diámetro con una capacidad de carga de 95.25 kg cada uno (Figura 6), con el fin de evitar algún daño al contenedor de agua, permitiendo realizar diferentes movimientos de oscilación que suponen ser la fuente de operación para el simulador.
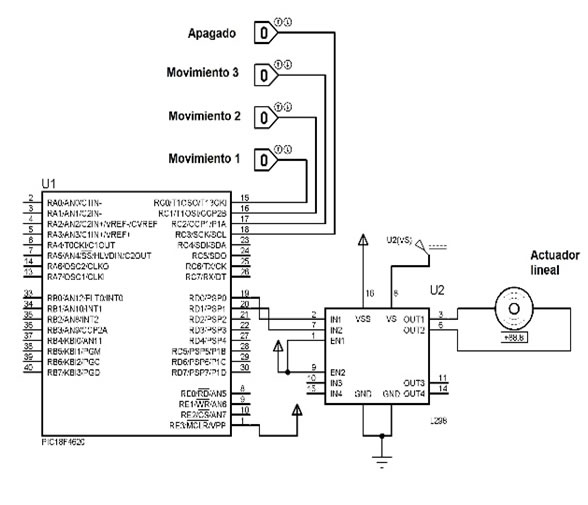
Para inducir el movimiento que simula el oleaje, se utilizó un impulsor mecánico (actuador lineal) "LACT10P" que opera a 12V, con una corriente de consumo de 3A, un vástago de 10 pulgadas con soporte de carga máxima en reposo de 500 libras y una carga máxima en movimiento de 110 libras con una velocidad máxima de movimiento de 0.5 pulgadas sobre segundo. Las turbinas de Kaplan junto con el acoplamiento electrónico se encargarán de aprovechar la energía mecánica de una corriente de agua que será generada por el actuador lineal y las bombas de agua.
Para realizar el sistema digital que controlará el impulsor mecánico de manera física, se utilizó un software especializado para microcontroladores, en específico, los controladores de interfaz de periférico (PIC), llamado MikroC.
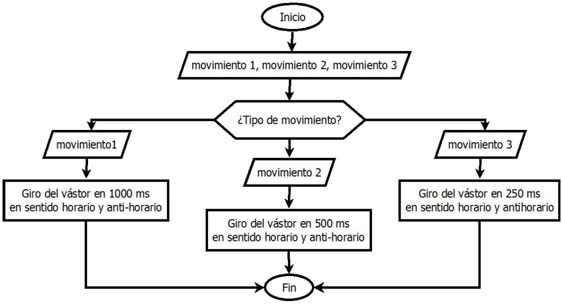
En esta interfaz se diseñó la programación de tres tipos de movimiento los cuales estuvieron basados para la generación de oleaje: el primero genera un movimiento al actuador lineal, que es interpretado como un avance en el vástago del motor con una interrupción de 1000 ms. Posterior a dicha interrupción, el vástago comienza a retroceder durante el mismo tiempo, y esta operación se repite de manera cíclica. El segundo y tercer movimiento trabajan de manera similar, solo que el movimiento dos tiene una interrupción de 500 ms y el movimiento tres tiene una interrupción de 250 ms. En la Figura 7 se muestra el diagrama de flujo que corresponde a dicho programa.
Para la realización del presente proyecto, se construyeron 4 turbinas de Kaplan por medio de la tecnología de impresión tridimensional (3D). La tecnología de impresión 3D ha permitido utilizar una gran variedad de materiales para la construcción de diferentes estructuras robóticas, entre los principales materiales encontramos el Ácido Poli-láctico (PLA) y el Acrilonitrilo Butadieno Estireno (ABS).
El PLA es un polímero permanente e inodoro utilizado para fabricar baterías y juguetes resistentes a la humedad y a la grasa. La fuerza extensible y elasticidad del PLA se compara con el ABS, solo que la densidad es más baja.
El ABS es el nombre dado a una familia de termoplásticos. Se le llama plástico de ingeniería, debido a que es un plástico cuya elaboración y procesamiento es más complejo que los plásticos comunes. El acrónimo deriva de los tres monómeros utilizados para producirlo: acrilonitrilo, butadieno y estireno. El acrilonitrilo proporciona rigidez, resistencia a ataques químicos y estabilidad a alta temperatura, así como dureza. El butadieno, que es un elastómero, proporciona tenacidad a cualquier temperatura. El estireno aporta resistencia mecánica y rigidez.
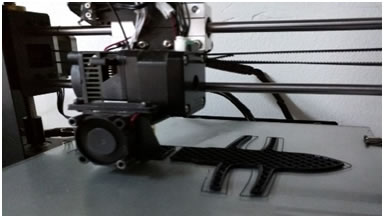
En este trabajo se tuvo la posibilidad de utilizar como material de impresión el polímero ABS, ya que por sus propiedades en comparación con el PLA proporcionó mayor resistencia y flexibilidad para la construcción de las turbinas observando en la Figura 8 el proceso de construcción para las turbinas de Kaplan.
Las medidas finales de la construcción de la turbina de Kaplan fue de 18.3 cm de largo, con un diámetro de 10.2 cm donde las aspas ocupan mayor espacio con 6 de ellas distribuidas homogéneamente y un diámetro de 2.5 cm para el poste de la turbina. El peso final por cada turbina fue de 50 g, lo que contribuyó a reducir la resistencia que la turbina ofrece al movimiento de las corrientes no superficiales. La construcción final de la turbina se observa en la Figura 9 con un total de 4.0 horas para su impresión, con una temperatura de extrusor de 230 grados centígrados, una temperatura de plataforma de impresión de110 grados centígrados y una velocidad de avance del extrusor de 2.0 mm/s. Este proceso se repitió de forma idéntica para cada uno de las cuatro turbinas construidas para el generador de energía undimotriz.
El sistema de acoplamiento eléctrico (Figura 10) consistió en un sistema de rotación de baja fricción que permitió el libre movimiento de las turbinas de Kaplan dentro del simulador de oleaje para la generación de corriente eléctrica, logrando la transformación de corriente alterna a corriente directa, mediante un motor DC que opera en forma de generador de energía. Este sistema permitió que la generación de voltaje dentro del generador fuese exitosa, ya que entre más movimiento mecánico tuviera la turbina, mayor sería el voltaje que produciría.
El motor empleado dentro de este sistema de acoplamiento funciona entre los 3 y 12V, con una corriente sin torque de 70mA y con una corriente máxima a 800mA alcanzando 11,500 revoluciones por minuto a los 6V. El peso final de este acoplamiento fue de 50g, donde 18 g fue el peso que tenía el generador en energía, y los 32 g restantes del sistema de rotación.
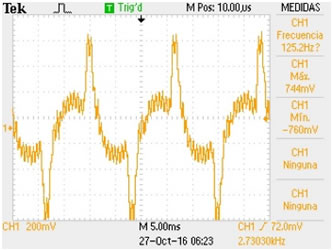
La conversión eléctrica fue monitoreada por medio del sistema de conversión analógico/digital presentado anteriormente, el cual funcionó como regulador dentro del funcionamiento del generador eléctrico, por medio del circuito tipo puente de diodos con un rectificador encargado de entregar el voltaje en DC. Las señales características obtenidas en una de las evaluaciones del generador de energía se muestran en la Figura 11, que consistió en una captura de pantalla por el osciloscopio Tektronix TDS 2022B. Estas visualizaciones permitieron caracterizar cuál de los patrones de oleaje otorgaba un mejor movimiento rotatorio hacia las turbinas de Kaplan, ya que entre más movimiento tuviese cada turbina, mayor amplitud se observaba en la onda manifestada por el generador eléctrico.
Para el control del sistema digital de movimiento del impulsor mecánico, se hizo uso el PIC18F4620, utilizando 2 de sus 5 puertos bidireccionales. El PORTC fue utilizado para seleccionar uno de los tres tipos de rutina (mencionadas anteriormente)y el PORTD se encargó de traducir la instrucción dada por el PORTC enviando un pulso de respuesta al puente H L298, el cual se encomendó en hacer el tipo de movimiento según lo programado en el PIC.
El circuito fue realizado en una proto-board conectando a dos fuentes de energía de corriente directa, en la primera fuente se conectó el PIC con un voltaje de operación de 5V y el puente H L298D fue alimentando por ambas fuentes, ya que en las especificaciones de éste necesita de dos voltajes, uno de 5V y otro de 12V (como máximo) para su operación (según las características de fabricante) como se observa en la Figura 12.
Una vez establecida la conexión, se realizaron diferentes pruebas en las que se demostró que tipo de movimiento era el más satisfactorio para la generación de oleaje dentro del simulador, ya que entre menos tiempo de avance y retroceso tuviera el vástago mayor cantidad de olas generaba, sin embargo, para la generación de un mayor oleaje se implementó un juego de tres bombas de agua, las cuales ayudarían a facilitar el movimiento rotatorio para cada una de las turbinas.
Como resultado de los diseños presentados en el apartado anterior, se tiene la construcción del simulador de oleaje con las dimensiones anteriormente mencionadas con una capacidad máxima de 210 litros, siendo esta, el área de trabajo para el generador de energía.
Referente al impulsor mecánico (actuador lineal), éste fue adaptado a la plataforma móvil con el fin de efectuar diferentes movimientos de oscilación, siendo las fases de prueba las que permitieron determinar qué tipo de movimiento era el más óptimo para la generación de olas, ya que en las visualizaciones con el osciloscopio permitieron establecer que movimiento ofrecía una mayor amplitud por el generador eléctrico, tomando en cuenta que entre mayor amplitud hubiera en la onda, mayor seria el voltaje de generación por la turbina de Kaplan.
En la Figura 13 se observa las ilustraciones físicas del simulador de oleaje, el impulsor mecánico y la conexión entre el simulador y el impulsor para la generación de energía undimotriz.
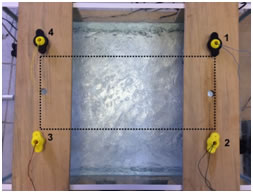
La generación de energía eléctrica dentro del simulador de oleaje se realizó por medio de dos configuraciones sobre las turbinas de Kaplan, las cuales se basaron en colocar dos figuras geométricas regulares que tuvieran 4 vértices (rectángulo y trapecio rectángulo) representando cada vértice una turbina dentro del simulador, siendo la configuración rectángulo la de mayor generación de voltaje AC.
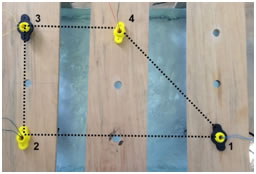
Esta configuración se basó en colocar cuatro turbinas a lo largo del simulador ejemplificando los cuatro vértices que tiene un rectángulo en un tiempo de 40 minutos, donde las turbinas 1 y 2aprovecharon el caudal generado por las bombas de agua, y las turbinas 3 y 4 aprovecharon el movimiento generado por el actuador lineal. En la Figura 14 se ilustra la configuración dentro del simulador.
La configuración rectángulo fue la más adecuada para la generación de voltaje AC dentro del simulador, ya que las capturas de pantalla del osciloscopio (Figura 15) permitieron visualizar una mayor amplitud en la onda originada por el generador en cada una de las turbinas (en comparación con las otras dos configuraciones), tomando en cuenta que entre mayor giro tuvieran las turbinas de Kaplan mayor sería la generación de voltaje AC. Se observa que las turbinas 1 y 2 presentaron un giro mucho más rápido, produciendo un mayor voltaje en comparación con las turbinas 3 y 4, ya que estas tenían un giro de menor velocidad, y por ende, menor producción de voltaje.
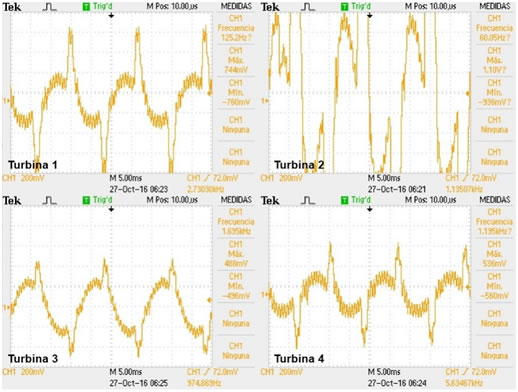
En la tabla 1se muestra el voltaje AC máximo, mínimo y promedio proporcionado por cada una de las turbinas dentro de la configuración rectángulo.
| Turbina | Voltaje máximo | Voltaje mínimo | Voltaje promedio |
| 1 | 744 mV | -760 mV | 478 mV |
| 2 | 1.10 V | -936 mV | 648 mV |
| 3 | 488 mV | -496 mV | 313 mV |
| 4 | 536 mV | -560 mV | 328 mV |
Esta configuración se basó en colocar dos de las turbinas a lo largo del simulador como base menor, y las turbinas restantes como base mayor, dando alusión a un trapecio rectángulo dentro del simulador por un tiempo de 40 minutos como se observa en la Figura 16.
De manera similar a la configuración anterior, en la Figura 17 se ilustra la señal proporcionada por cada uno de los generadores dentro de esta configuración, siendo la turbina 2 la que mayor amplitud de señal obtuvo comparada con las otras tres turbinas, ya que gozó de un mayor movimiento dentro del simulador aprovechando el oleaje producido por el actuador lineal. Las turbinas 1 y 3 tuvieron una amplitud menor, debido a que el movimiento mecánico ejercido por las bombas de agua fue menor, y la turbina 4 fue aquella que menor amplitud de señal obtuvo, ya que esta turbina solo recibió el movimiento mecánico restante de la turbina 3.
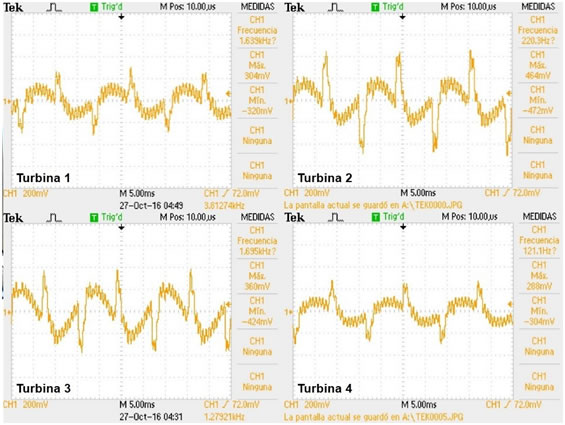
En la tabla 2 se muestra el voltaje AC máximo, mínimo y promedio proporcionado por cada una de las turbinas dentro de la configuración trapecio rectángulo.
| Turbina | Voltaje máximo | Voltaje mínimo | Voltaje promedio |
| 1 | 304 mV | -320 mV | 198 mV |
| 2 | 464mV | -472 mV | 297 mV |
| 3 | 360 mV | -424 mV | 249 mV |
| 4 | 288 mV | -304 mV | 188 mV |
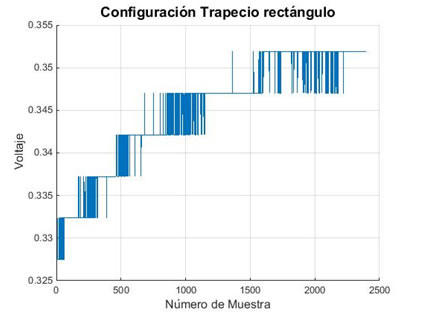
Posterior a ello, cada uno de los voltajes obtenidos en corriente alterna por las dos configuraciones fueron enviados al convertidor CA/CD, con el fin de conocer el valor de voltaje máximo en corriente directa sumando los cuatro generadores de ambas configuraciones por un periodo de tiempo de 40 minutos.
En la Figura 18 se muestra el desempeño de la suma de los cuatro generadores que tuvo la configuración rectángulo durante el periodo de tiempo ya mencionado que fue un total de 0.7038V. De manera similar, en la Figura 19 se muestra la capacidad de la configuración trapecio rectángulo con un voltaje total de 0.3519V.

En este trabajo se construyó un generador de energía undimotriz. Estas tecnologías que aprovechan la energía de los océanos por medio de las olas del mar son relativamente nuevas alrededor del mundo en relación con aquellas que emplean combustibles fósiles para producir energía.
El prototipo presentado para la generación de energía a partir de olas probó ser funcional, demostrando que el simulador de oleaje que se construyó presenta un área de trabajo adecuada para la generación de energía undimotriz, utilizando las turbinas de Kaplan diseñadas y construidas. El diseño propuesto de la turbina de Kaplan demostró aprovechar el oleaje generado dentro del simulador produciendo energía mecánica para ser convertida en energía eléctrica, ya que los caudales generados dentro del simulador fueron de gran velocidad para generar energía mecánica aunque se careciera de altura. El actuador lineal y las bombas de agua ayudaron a una mayor generación de movimiento mecánico dentro del simulador. El convertidor AC/DC demostró ser funcional para la generación de voltaje DC por medio de la evaluación del sistema de energía undimotriz por ambas configuraciones, ya que éstas fueron puestas a prueba en un periodo de tiempo de 40 minutos, permitiendo observar el comportamiento de ambas configuraciones, y así, determinando que la configuración rectángulo fue la mejor en producir energía DC en comparación con la configuración trapecio rectángulo.
Se construyó un sistema electrónico que permitió realizar la conversión de las señales de corriente alterna producidas por las turbinas de Kaplan y transformarlas en señales de corriente directa. Estas pudieron ser digitalizadas para obtener una representación gráfica de los valores obtenidos comprobando a partir de esta información que las turbinas propuestas pudieron funcionar como generadores de energía.
La Dra. Mariel Alfaro Ponce e Iván Matehuala Morán agradecen el apoyo de PROMEP SEP23-005.
Aires, F. R. (2011). Aprovechamiento de la Energía Undimotriz. Proyecciones, 53-66.
Alevison, W., & Gorham, J. (1989). Effects of artificial reef deployment. Bulletin of Marine Science, 646-661.
André Stople, R. (2011). Testing efficiency and characteristics of a Kaplan-type small turbine. Noruega: NTNU Innovation and creativity.
Boehlert, G., & McMurray, T. C. (2007). Ecological Effects of Wave Energy Development in the Pacific Northwest. Oregon: NOAA.
Burman, K., & Walker, A. (2009). Ocean Energy Technology Overview. Golden: Federal Energy Managament Program.
Clement, A., McCullen, P., Falcao, A., Fiorentino, A., Gardner, F., Hammarlund, K., . . . Thorpe, T. (2002).
Wave Energy in Europe; Current Status and Perspectives. Renewable and Sustainable Energy Reviews, 405-431.
Díaz Velilla, J. P. (2015). Sistemas de energías renovables. Paraninfo.
Domínguez Gómez, J. A. (1995). Energías alternativas. España: EQUIPO SIRIUS.
Falnes, J. (2007). A review of wave-energy extraction. Science-Direct, 190-194.
González Romero, A. (2009). Tecnologías para el aprovechamiento de la energía de las olas y de las corrientes marinas. España: Innovamar.
Grossman, G., Jones, G., & Seaman, W. (1997). Do artificial reefs increase regional fish production. Fisheries, 17-23.
Guiberteau, K., Liu, Y., & Kozman, T. (2012). Investigation of Developing Energy Technology in the Gulf of Mexico. Distributed Generation and Alternative Energy Journal, 36-52.
Hewitt, N. (2012). Heat pumps and energy storage - The challenges of implementation. Applied Energy, 89(1), 37-44.
INEGI. (2006). Datos Básicos de Geografía de México.Estadística, I. N.
Inger, R., Atrill, M., Bearshop, S., Broderick, A., Grecian, J., Hogson, D., . . . Sheehan, E. (2009). Marine renewable energy: potential benefits to biodiversity. Journal of applied ecology, 46(6), 1145-1153.
Libertia, L., Carillo, A., & Sannino, G. (2013). Wave energy resource assessment in the Mediterranean , the Italian perspective. Renewable Energy, 50, 938-949.
López, I., Andreu, J., Ceballos, S., & Martínez de Alegría , I. M. (2013). Review of wave energy technologies and the necessary power-equipment. Renewable and Sustainable Energy Reviews, 413-434.
Masuda, Y. (1971). Wave-activated generator. International Colloq Exposition Oceans.
Mollison, D. (1980). The prediction of device performance. London: Academic Press.
Mollison, D. (1986). Wave climate and the wave power resource. Berlin: Springer.
Mueller, M., & Wallace, R. (2008). Enabiling science and technology for marine renewable energy. Energy Policy, 36(12), 4376-4382.
Pelissero, M., Haim, P. A., Oliveto, G., Galia, F., & Tula, R. (2011). Aprovechamiento de la energía undimotriz. Proyecciones, 53-65.
Posso, F. (2002). Energía y Ambiente: Pasado, Presente y Futuro. Geoenseñanza, 7(1-2), 54-73.
Roldán Viloría, J. (2008). Energías Renovables: Lo que hay que saber.Madrid: PARANINFO.
Salter, S. (1974). Wave Power. Nature, 249, 720.
Shepparda, C., Dixon, D., Gourlay, M., Shepparda, A., & Payet, R. (2005). Coral mortality increases wave energyreaching shores protected by reef flats: Examples from the Seychelles. Estuarine. Coastal and Shelf Science, 64(2), 223-234.
[a] Escuela Superior de Tizayuca, Universidad Autónoma del Estado de Hidalgo,
Tizayuca, Hidalgo, México.
Correo de Correspondencia: ivan_171194@hotmail.com
[b] Centro de Innovación y Desarrollo Tecnológico en Cómputo, Instituto Politécnico Nacional, Ciudad de México, México.
[c] Unidad Profesional Interdisciplinaria de Biotecnología, Instituto Politécnico Nacional, Ciudad de México, México.