Aplicando Conceptos de Geometría Analítica en las Etapas de Segmentación y Normalización del Reconocimiento del Iris
Resumen
El reconocimiento de iris se ha convertido en el proceso biométrico más utilizado en la actualidad, debido a su confiabilidad; y la geometría analítica es muy importante en su etapa de segmentación de iris.
Palabras clave: Iris, proceso biométrico, reconocimiento, coordenadas polares, formula de la distancia entre dos puntos.
Abstract
The recognition of iris has become the most used biometric process at present, due to its reliability; and analytical geometry is very important in its stage of iris segmentation.
Keywords: Iris, biometric process, recognition, polar coordinates, formula of the distance between two points
Introducción
El reconocimiento de iris es el segundo proceso biométrico más confiable y seguro en la identificación y autenticación de personas después del ADN; debido a las características fenotípicas e invariables del iris.
El interés en el reconocimiento de iris se ha incrementado; debido a que es de gran importancia en aplicaciones de seguridad, control de acceso a aeropuertos, sitios de alta seguridad, reconocimiento pasivo de criminales o terroristas en lugares públicos y, últimamente, en cajeros automáticos, en sistemas de reconocimiento biométrico para el control de acceso y seguridad en entornos domóticos o en móviles de última generación.
Una de las etapas importantes en el reconocimiento de iris es la segmentación, debido a que gracias a esta etapa se puede localizar el iris en la imagen del ojo; esta localización se logra en base a conceptos de la geometría analítica, tales como la distancia entre dos puntos y la conversión de coordenadas polares a rectangulares.
Geometría analítica
La geometría es la Rama de las matemáticas que se ocupa de las propiedades del espacio. En su forma más elemental, la geometría se ocupa de problemas métricos como el cálculo del área y diámetro de figuras planas y de la superficie y volumen de cuerpos sólidos. Otros campos de la geometría son la geometría analítica, geometría descriptiva, topología, geometría de espacios con 4 o más dimensiones, geometría fractal y geometría no euclídea.
La geometría analítica fue impulsada por René Descartes y se considera el estudio de ciertas líneas y figuras geométricas aplicando técnicas básicas del análisis matemático y del álgebra en un determinado sistema de coordenadas. [10]
Distancia entre dos puntos
Para encontrar la distancia entre dos puntos P (x1, y1) y Q (x2, y2) que no estén en la misma recta vertical u horizontal, construimos un triángulo rectángulo que tenga al segmento PQ por hipotenusa, como se muestra en la figura, las longitudes de los lados de los catetos son (x2 − x1) y (y2 − y1). La distancia entre P y Q es la longitud de la hipotenusa del triángulo. Recordemos que el teorema de Pitágoras dice que "En un triángulo rectángulo, el cuadrado de la hipotenusa es igual a la suma de los cuadrados de los catetos".[11]
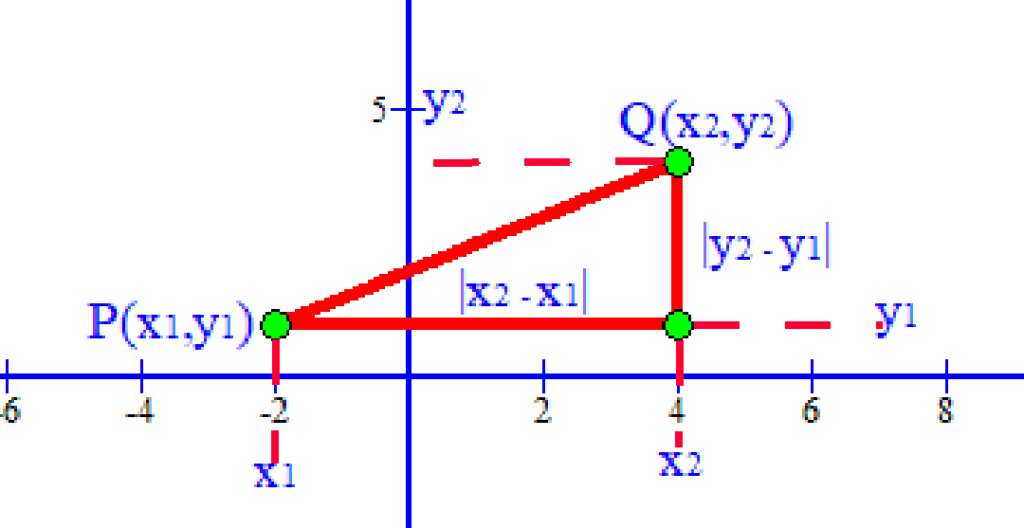
Entonces:
Coordenadas Rectangulares
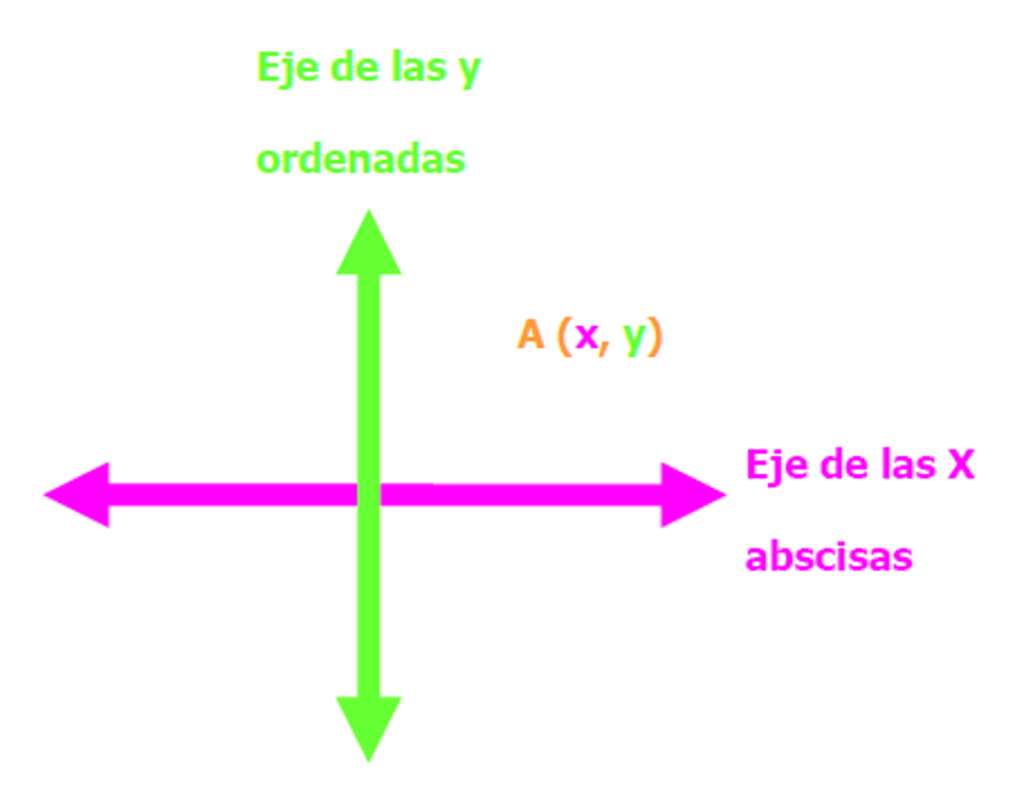
Son un tipo de coordenadas ortogonales usadas en espacios euclídeos, para la representación gráfica de una relación matemática (funciones matemáticas y ecuaciones de geometría analítica), o del movimiento o posición en física, caracterizadas por tener como referencia ejes ortogonales entre sí que concurren en el punto origen. En las coordenadas cartesianas se determinan las coordenadas al origen como la longitud de cada una de las proyecciones ortogonales de un punto dado sobre cada uno de los ejes. La denominación de 'cartesiano' se introdujo en honor de René Descartes, quien las utilizó por primera vez de manera formal.
En geometría plana, dos líneas rectas, llamadas eje x y eje y, forman la base de un sistema de coordenadas Cartesianas en dos dimensiones. Como se muestra en la siguiente imagen,
Coordenadas Polares
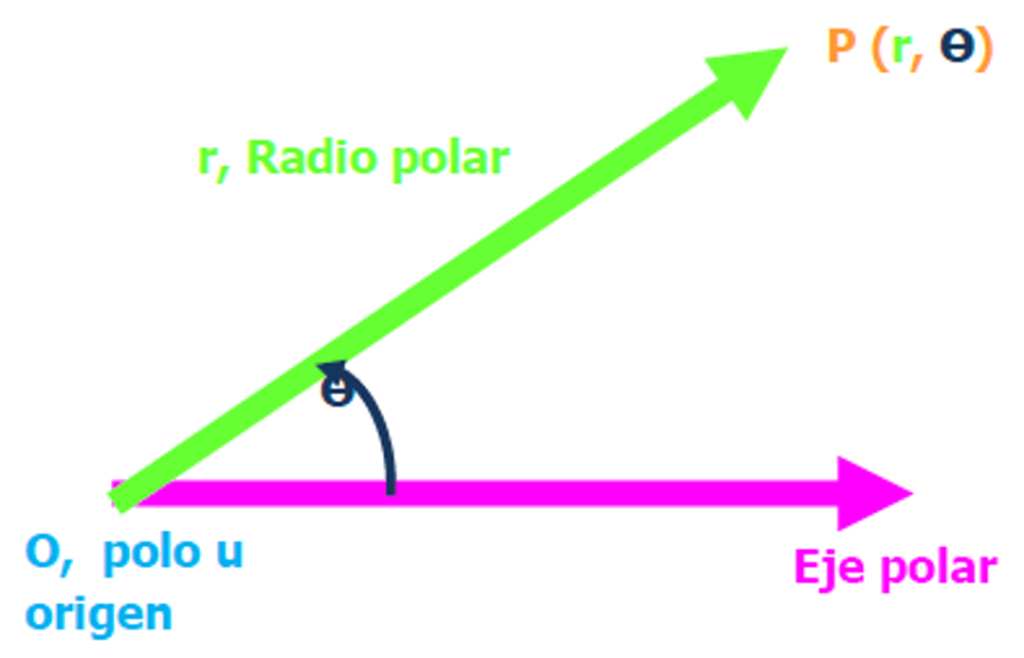
Es un sistema de coordenadas bidimensional en el cual cada punto o posición del plano se determina por un ángulo y una distancia. Mientras que el ángulo θ es la "coordenada angular" o "ángulo polar", también llamado "argumento"; la distancia es el radio como se puede observar en la siguiente imagen.
Conversión de coordenadas
En el plano de ejes xy con centro de coordenadas en el punto O se puede definir un sistema de coordenadas polares de un punto M del plano, definidas por la distancia r al centro de coordenadas, y el ángulo θ del vector de posición sobre el eje x.[12]
- Conversión de coordenadas polares a rectangulares
Definido un punto en coordenadas polares por su ángulo θ sobre el eje x, y su distancia r al centro de coordenadas, se tiene:
y= r cos θ
- Conversión de coordenadas rectangulares a polares
Definido un punto del plano por sus coordenadas rectangulares (x,y), se tiene que la coordenada polar r es:

Para determinar la coordenada angular θ, se deben distinguir dos casos:
Para r = 0, el ángulo θ puede tomar cualquier valor real.
Para r ≠ 0, para obtener un único valor de θ, debe limitarse a un intervalo de tamaño 2π. Por convención, los intervalos utilizados son [0, 2π) y (−π, π].
Reconocimiento de iris
El color característico del ojo de una persona fue usado como identificador en el siglo XIX, por el físico francés Alphonse Bertillon[6], la idea de usar los patrones del iris como una especie de huella óptica, fue propuesta por primera vez por Frank Burch, un importante cirujano ocular y oftalmólogo de St. Paul, en el año 1936, quien lo sugirió en uno de sus discursos, dirigidos a sus colegas de profesión en el congreso anual de la American Academy of Ophthalmology.
En 1987, dos oftalmólogos, Leonard Flom y Aran Safir [7], rescataron la idea patentándola y presentándosela dos años más tarde al profesor por aquel entonces de la Harvard University, John G. Daugman, con el objetivo de crear los algoritmos necesarios para desarrollar correctamente un sistema eficaz de reconocimiento de iris. Los trabajos realizados por Daugman, fueron plasmados parcialmente en su trabajo titulado “High Confidence visual recognition by test of statistical independence”, supusieron un avance definitivo en el campo de la identificación personal basada en patrones de iris. Los algoritmos que desarrollo posteriormente, fueron patentados en 1994 (“Biometric Personal Identification System Based on Iris Analysis”), sentando las bases de los actuales sistemas y productos de reconocimiento de iris.
Posteriormente, Aran Safir y Leonard Flor, fundaron conjuntamente con John Daugman la compañía Iris Corporation, poseedora de la patente y encargada de distribuir las licencias, a las diferentes compañías desarrolladoras e integradoras de sistemas de reconocimiento, que desearán hacer uso del patrón del iris.
El reconocimiento por iris se basa en los detalles que presenta la textura del iris, que por características inherentes a su morfología presenta grietas, criptas o estrías entre otras características que conforman una textura altamente rica en detalles.
Esta textura formada en la etapa embrionaria es estocástica y posiblemente de generación caótica, lo cual determina que los fenotipos de dos iris con el mismo genotipo, conjunto tal como gemelos idénticos y siameses, presenten detalles no correlacionados. La cantidad de información que presenta este indicador biométrico es tan considerable que permite la identificación de individuos con procedimientos no invasivos y que adicionalmente se desarrolla a distancias prudenciales y sin restricciones ambientales, con resultados muy confiables, lo que permite la implementación de sistemas de verificación de identidad aplicables a condiciones reales; en estos sistemas se debe dar gran importancia a los algoritmos de pre procesado y procesamiento como tal, debido a que la información efectiva con que se cuenta para lograr el proceso de reconocimiento de identidad es mucho menor a la conseguida en sistemas similares con imágenes bajo condiciones controladas de prueba y evaluación.
Etapas del Reconocimiento de Iris
La mayoría de los sistemas de reconocimiento de iris se basan en los cinco procesos básicos de [1].
- 1. Adquisición. En este proceso se obtiene la imagen del ojo.
- 2. Segmentación. En este proceso se localiza el iris en la imagen del ojo.
- 3. Normalización. En este proceso se transforma la imagen del iris segmentada de coordenadas cartesianas a coordenadas polares.
- 4. Codificación. En este proceso se usa una rutina para extraer las características de la imagen del iris normalizada.
- 5. Identificación. En este proceso se determina si el código obtenido pertenece a las características almacenadas en la base de datos.
Para efectos de esta investigación solo se abordarán las primeras tres etapas del reconocimiento de iris.
Adquisición de la imagen
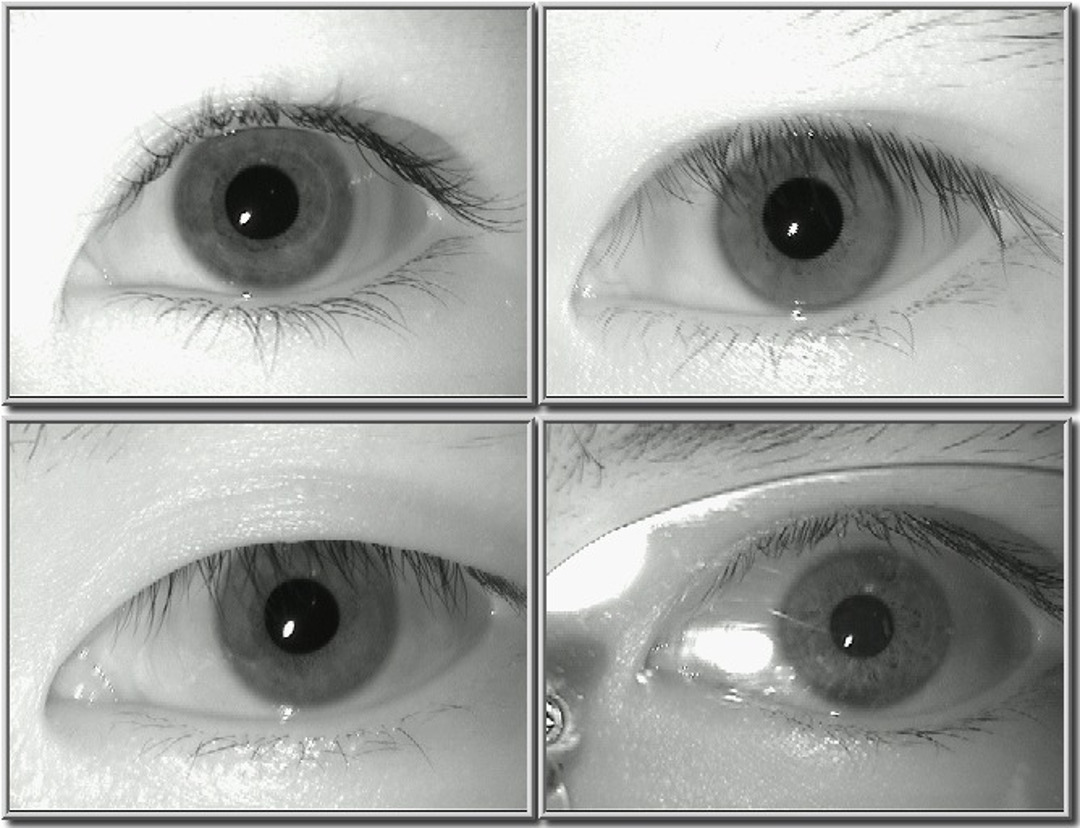
Para efectos de este trabajo se utilizó la base de datos MMU Iris, versión 1, de la Universidad Multimedia de Malasia. MMU1 cuenta con un número total de 450 imágenes del iris que fueron tomadas usando LG IrisAccess ® 2200. Esta cámara es semi-automático y opera en el intervalo de 7-25 cm. Estas imágenes del iris son aportadas por voluntarios con diferente edad y nacionalidad. Cada uno de ellos contribuyo con 5 imágenes del iris de ambos ojos.
Segmentación
En esta etapa se encontraron los círculos de la pupila y el iris; a través de los siguientes métodos:
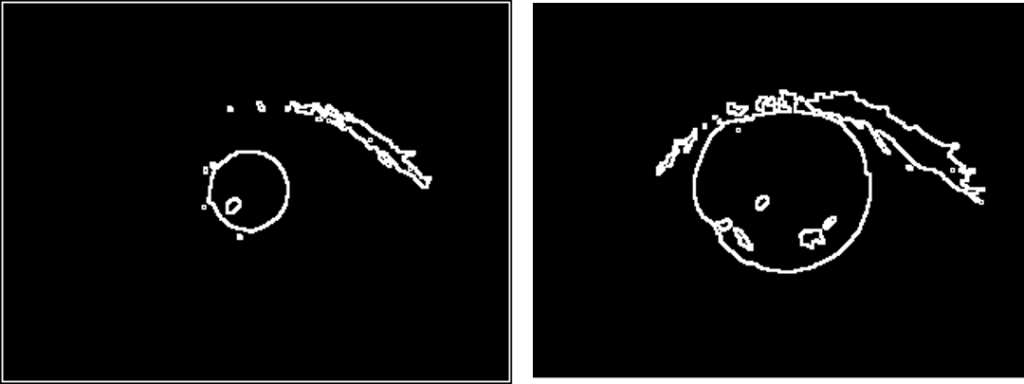
Prewitt
Se encontraron los bordes con prewitt; para ello primero se binarizó la imagen con dos valores uno de 60 y otro de 100, para encontrar la pupila y el iris respectivamente.
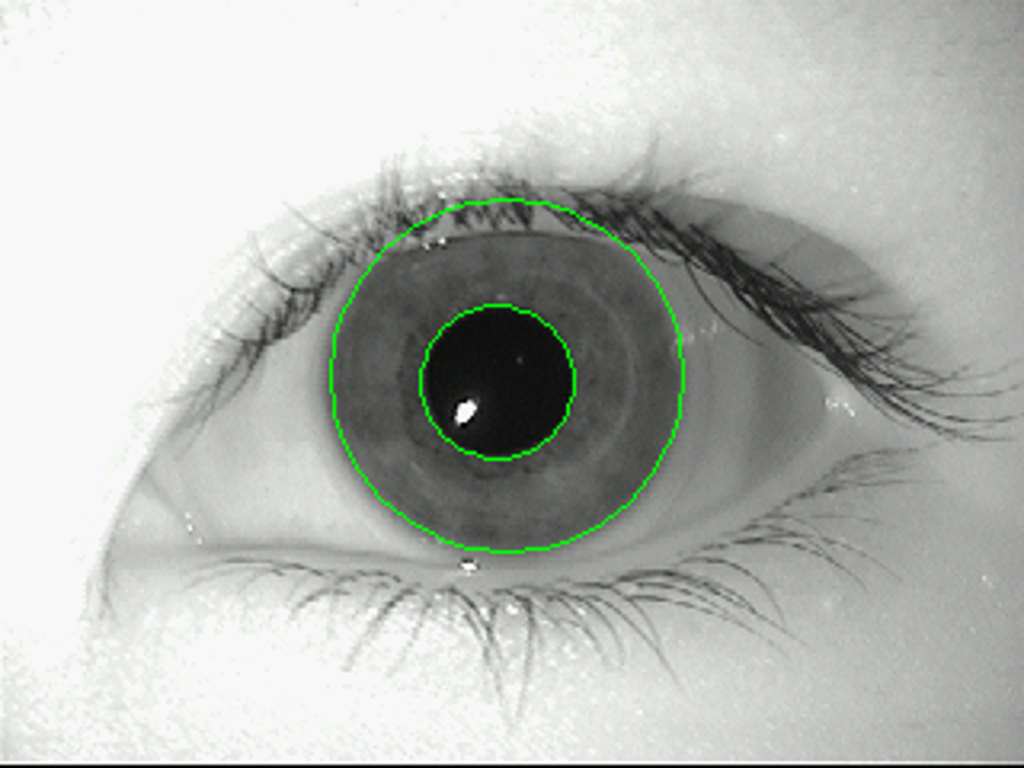
Transformada Hough para Círculos
Para ello se aplicó la fórmula de distancia entre dos puntos de geometría analítica:
Donde:
r = radio
Xi, Xi= coordenadas de la imagen
Y0, Y0 = coordenadas del centro del círculo
De la ecuación anterior despejamos:
Y0 = y-r sin(θ)
Con lo cual se logra encontrar el centro del círculo de la pupila y del iris respectivamente. Con los cuales se puede trazar posteriormente dichos círculos como se muestra en la siguiente imagen.
Normalización
Debido a que en la segmentación se obtiene una región anular, se procede a transformar dicha región del iris en una región rectangular. O bien convertir coordenadas polares a cartesianas.
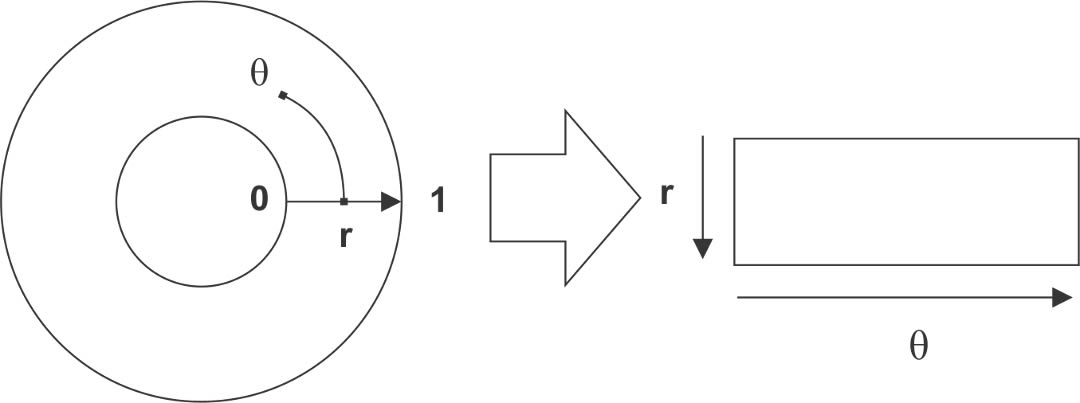
Para normalizar la imagen se utilizó el método Rubber Sheet de Daugmann, el cual consiste en:

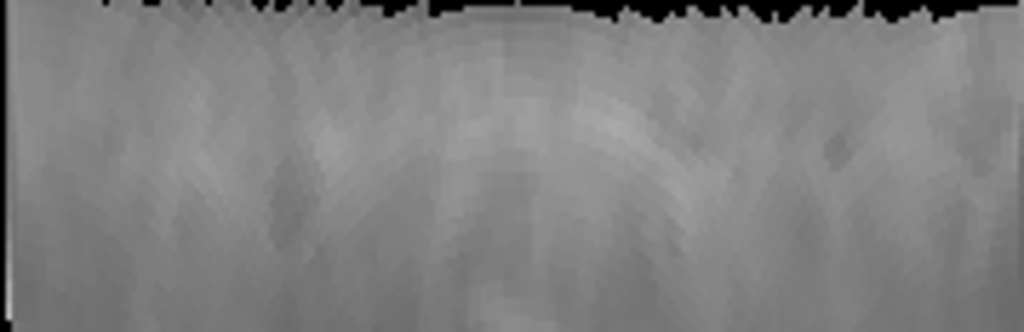
Las matemáticas es una ciencia fundamental en las ciencias de la computación, un ejemplo claro queda demostrado en esta investigación, donde se puede observar claramente la aplicación de la geometría analítica en las etapas de segmentación y normalización. En la etapa de segmentación para poder localizar el iris y la pupila se utiliza la Transformada Hough para Círculos, la cual se basa en la distancia entre dos puntos y manejo de coordenadas polares para encontrar las coordenadas del centro de la pupila y el iris; mientras que en la etapa de normalización se emplea la conversión de coordenadas polares a cartesianas, para poder obtener una muestra rectangular del iris y en base a esa muestra hacer las consecuentes etapas del reconocimiento del iris.
Bibliografía
Daugman, G. J., (1994). Patent Biometric personal identification system based on iris analysis.
Dunstone, T., and Yager, N. (2009). Biometrics System and Data Analysis. In: Springer, Australia
Khaw, P., (2002). Iris recognition technology for improved authentication. In: SANS Institute Reading Room site. pp. 3-12.
Montero, D.R.S,(2003). Tesis: Clasificador Híbrido de Patrones basado en la Lernmatrix de Steinbuch y el linear Associator de Anderson-kohonen. Instituto Politécnico Nacional. Centro de Investigación en Computación. Edo. de México.
Mora L. A., (2007). Tesis: Funciones Gabor Bidimensionales para el Análisis y Clasificación de Texturas. Instituto Politécnico Nacional, Sección de Estudios de Posgrado e Investigación de la Escuela Superior de Ingeniería Mecánica y Eléctrica, Edo. de México.
Tapiador M, and Siguenza P., Tecnologías Biométricas Aplicadas a la Seguridad. México: Alfaomega Ra-MA.
Tisse, C., Martin L., Torres L. and M. Robert, (2000). Person identification technique using human iris recognition. In: Electronics and Telecommunications (ISETC), 9th International Symposium on. pp. 265 – 268.
Roberto O. Cruz L., Raúl Santiago M., y Héctor J. Puga S. (2012). Mejorando el Clasificador Asociativo de Patrones en Bases de Datos Multi-Clase. En: COMIA, pp.
Garza. B. (2014). Geometría Analítica. 1ª Edición. México: Pearson.
Caballero. A. (2010). Geometría Analítica. 20ª edición. México: Esfinge.
Swokowski, E. W. J. A. Cole. (2011). Geometría, Trigonometría y Geometría Analítica. 13ª edición. México: Cengage Learning Editores, S.A. de C.V.
Aguilar Márquez, A., Bravo Vázquez, F. V., Gallegos Ruíz, H. A., Cerón Villegas, M., & Reyes Figueroa, R. (2009). Matemáticas simplificadas. México: Pearson & CONAMAT
[a] Escuela Preparatoria No. 3 UAEH, Identificador ORCID es 0000-0002-5978-7608, olivia_vazquez@uaeh.edu.mx