
Figura 1. Dispositivo háptico Novint Falcon
En los últimos años, los investigadores del área de control, mecatrónica y robótica han mostrado gran interés en la robótica médica, por lo que es de gran importancia contar con dispositivos hápticos eficientes que funcionen correctamente y ayuden al médico terapeuta en el diagnóstico y rehabilitación de un paciente. Los dispositivos hápticos tienen muchos aportes desde aplicaciones de entretenimiento hasta aplicaciones más complejas como es el diagnóstico de un paciente con una discapacidad neuropsicológica, cirugía, entre otros.
El presente trabajo muestra resultados del uso de las Tecnologías de la Información y la Comunicación (TIC) para la mejora de los procesos de enseñanza-aprendizaje dentro del aula propiciando un ambiente de trabajo muy dinámico, mediante una interfaz háptica enfocada a la rehabilitación de pacientes con discapacidad motriz de miembro superior que permite al alumno poner en práctica los conocimientos teóricos sobre el diseño de controladores lineales y planeación de trayectorias, en este trabajo se utiliza una interfaz háptica llamado Novint Falcon para interacción hombre-máquina la cual proporciona al paciente una retroalimentación sobre lo que sucede en el ambiente generado por una computadora, y mediante el uso del software MATLAB se diseñan controladores y trayectorias apropiadas que ayudan a la rehabilitación del paciente.
En este trabajo los alumnos se concientizan sobre problemáticas sociales y áreas de oportunidad como lo es la robótica médica, aplicando los conceptos teóricos de las asignaturas de control lineal, mecatrónica, robótica, control inteligente, entre otras de las diferentes carreras de la Facultad de Ingeniería Electromecánica.
Palabras clave: Dispositivos hápticos, interfaz háptica, renderizado, robots y control.
In the last years, the researchers in control, mechatronic and robotic have shown great interest in medical robotics, it is very important to have efficient haptic devices that function properly and to the doctor in the diagnosis and rehabilitation a patient. Haptic devices have many contributions from entertainment applications to more complex applications such as the diagnosis of a patient with neuropsychological impairment, surgery, among others.
This paper presents results of use of information and communications technology (ICT) for improving the teaching-learning in the classroom and contribution an environment dynamic, using a haptic interface focused on the rehabilitation of patients with motor disabilities of upper limb which allows students to practice the theoretical knowledge of the design of linear controllers and path planning, this paper present a haptic interface Novint Falcon for man-machine interaction because present force feedback, this happens by the environment generated by the computer, and be use the MATLAB software drivers that help patient rehabilitation that are damaged.
In this work the students take aware of social problems, as medical robotics, applying the theoretical concepts of the linear control, mechatronics, robotics, intelligent control, among others subjects of the Faculty of Engineering Electromechanics.
Keywords: Haptic devices, haptic interface, rendering, robots and control.
El término háptica viene del griego haptesthai, que significa “tocar”, este término es empleado para describir cosas relacionadas con en el sentido del tacto (González, 2011) con un ambiente en tridimensional generado por una computadora que se conoce como realidad virtual. Actualmente los sistemas de realidad virtual presentan un inconveniente, que es la parte de estímulos para el sentido del tacto. Los investigadores del área háptica están encaminados a resolver estos problemas, que son retroalimentación de fuerza (kinestética) y retroalimentación táctil.
La kinestética se refiere a dispositivos que interactúan con músculos y tendones, y dan la sensación al humano que existe retroalimentación de fuerza. Estos dispositivos hápticos son robots manipuladores que proporcionan una fuerza de reacción (retroalimentación de fuerza) al usuario con fuerzas proporcionales al ambiente virtual en el que está el efector final.
La retroalimentación táctil se refiere a dispositivos que interactúan con los nervios de la piel, y son los que censan o retroalimentan la presencia de calor, presión y textura.
En el área de la mecatrónica, especialmente en la robótica, se tienen dispositivos hápticos que son capaces de dar al usuario retroalimentación de fuerza y retroalimentación táctil, depende si el usuario toca una superficie de diferentes texturas o se colisiona con un objeto tridimensional, manipula un objeto tridimensional, entre otros.
El Novint Falcon, mostrado en la Figura 1, es un pequeño robot manipulador delta que hace sentir a los usuarios peso, forma, textura, dimensión y efectos de fuerza. En este trabajo se utiliza este dispositivo, ya que los usuarios experimentan una amplia gama de sensaciones táctiles realistas que les permiten interactuar de una manera natural en un ambiente virtual (Novint Technologies, 2007). Por lo que los estudiantes interactuarán en forma sencilla y aprenderán el manejo de las TIC de una forma amigable y fácil.
Figura 1. Dispositivo háptico Novint Falcon
Las primeras aplicaciones de los dispositivos hápticas fueron en el área de sistemas de simuladores de vuelos aéreos con el objetivo de entrenar a pilotos y además de operarlos remotamente. Estas primeras aplicaciones actuaban en un solo sentido, es decir la fuerza aplicada a un mando se multiplicaba por un factor hacia las superficies de control aerodinámico, pero el usuario (piloto) no obtenía como respuesta la fuerza resistente.
Los usuarios que manipulan dispositivos de forma remota se le conocen como teleoperadores, para ellos es necesario que las fuerzas de contacto resistentes se retroalimente hacia el teleoperador, lo anterior se le conoce como “teleoperación háptica”. En los 50´s se construyó el primer operador háptico por el doctor Raymond Goertz, del Argonne National Laboratory, lo que permitió manipular a distancia sustancias radiactivas, estos fueron los primeros pasos en el empleo de retroalimentación de fuerzas en dispositivos teleoperados; actualmente son muchas las aplicaciones de estos dispositivos como la exploración espacial y submarina, desactivación de bombas, perforación peligrosas para el ser humano, etc.
En los últimos años, las investigaciones hápticas están encaminadas sobre los distintos estímulos de sensaciones del tacto. Actualmente, existen diversas interfaces hápticas encaminadas al apoyo de la medicina, como son simulación médica ya que pueden resultar útiles a la hora de intentar minimizar los daños ocasionados por el uso de procedimientos invasivos (laparoscopia/radiología de intervención) y permitir al médico obtener de forma remota. El objetivo de la háptica es que los médicos especialistas puedan realizar operaciones remotas en un futuro y además puedan utilizar los dispositivos hápticos en rehabilitación asistida por robots manipuladores (EcuRed, 2010). Por lo anterior, se diseña un sistema háptico con el objetivo que los estudiantes puedan manipular TIC de una forma sencilla para el aprendizaje significativo.
El equipo experimental empleado para crear un sistema háptico consiste de una computadora personal con software especializado para el renderizado háptico como MATLAB, Simulink, QUARC, 3D Animation, entre otros; además de un dispositivo háptico Novint Falcon. En la Figura 2 se muestra el equipo experimental utilizado por los estudiantes y que puede ser fácilmente extendido para el diagnostico de pacientes con alguna discapacidad en miembros superiores como es en mano, muñeca, etc. En esta sección se hace una descripción breve del equipo experimental con sus características.

Figura 2. Equipo experimental
Computadora personal
Se requiere de una computadora personal, que puede ser una laptop o computadora de escritorio, que cubra las características siguientes: Sistema Operativo de 32 bits, Windows 7 o Windows 8 y Memoria RAM de 2 GB mínimo.
Dispositivo háptico
El dispositivo háptico comercial empleado en la experimentación es un Novint Falcon (véase Figura 1), este fue desarrollado para videojuegos con realidad virtual por la empresa Novint Technologies Inc. permite al usuario la interacción con un ambiente virtual generado por una computadora, haciéndolo parte de dicho escenario, con retroalimentación de fuerzas.
Tiene un tiempo de muestreo de 2 ms (0.5Khz), lo que permite al software tener una buena resolución para los experimentos y así brindar al usuario un preciso estímulo kinestésico (retroalimentación de fuerza) al momento de interactuar con el mundo virtual.
El dispositivo Novint Falcon da como salida un vector de 3 dimensiones que contiene las posiciones cartesianas X, Y y Z (metros) en la dirección que muestra la Figura 3; y como entrada, recibe un vector de fuerzas en sus componentes Fx, Fy y Fz (newton).
Los estados de los botones son dados como un vector de valores lógicos, que indican cuando el botón es presionado (verdadero) o no (falso).
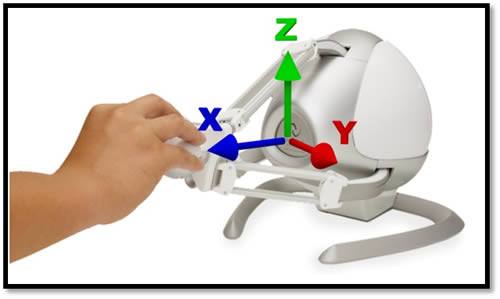
Figura 3. Posiciones cartesianas
Las especificaciones más importantes del Novint Falcon son las siguientes: 3 grados de libertad; 3 grados de retroalimentación; 101x101x101 mm de espacio de trabajo; 9 Nmm de fuerzas máximas.
De la página oficial del Novint Falcon se descargan los drivers para que pueda ser reconocido por una computadora, del cual se requieren los siguientes drivers:
Software
El software empleado para los experimentos es MATLAB con la librería de Simulink de cualquier versión; ya que permite trabajar el dispositivo háptico con este software y crear ambientes virtuales. Asimismo, se utiliza la librería Simulink 3D Animation, donde se realiza la aplicación para vincular modelos Simulink y algoritmos de MATLAB a los objetos gráficos en 3D. En este mismo sentido, se utiliza para visualizar y verificar el comportamiento de los sistemas dinámicos del entorno de realidad virtual. Los objetos tridimensionales se representan en Virtual Reality Modeling Language (VRML), que es un lenguaje de modelado 3D. El modelo creado del mundo 3D permite cambiar la posición, rotación, escala y otras propiedades de los objetos durante escritorio o simulación en tiempo real, tal como se muestra en la Figura 3.
Figura 3. Simulink 3D Animation
Otro software empleado es QUARC, que es un sistema de creación de prototipos y producción rápida de tarjetas de adquisición de datos Quanser para el control en tiempo real. QUARC trabaja con MATLAB para permitir modelos de Simulink que se ejecutan en tiempo real en una variedad de objetivos. Por lo que, QUARC facilita la creación de modelos de Simulink capaces de correr en tiempo real y fuera de la PC.
En la Figura 4 muestra el diseño de la interface háptica donde se aprecia una computadora personal, el dispositivo háptico y el alumno.

Figura 4. Interfaz háptica
En la etapa 1, el alumno interactúa con un dispositivo háptico para percibir el entorno generado por la cumputadora y, a través del sensado táctil, las señales nerviosas percibidas en los dedos, éstas son enviadas al cerebro en donde son grabadas y analizadas para percibir las propiedades de los objetos; tales como temperatura, forma, textura y suavidad, las cuales son medidas utilizando equipo controlado con computadoras digitales y métodos psicofísicos. La habilidad humana para controlar fuerzas de contacto durante la exploración y manipulación es caracterizada para conocer las limitaciones sensoriales.
Por otra parte, en la etapa 2, la estimulación del sentido del tacto se lleva a cabo mediante el envío de información de posición y fuerza a la computadora, la cual procesa y cambia el ambiente virtual. Dando lo que se conoce como Interacción hombre-máquina.
Es así como el alumno puede diseñar sus propios entornos virtuales y algoritmos que le permiten aplicar sus conocimientos y desarrollar habilidades para la solución de problemáticas. La interface tiene la versatilidad de trabajar en modelos virtuales ya establecidos y que el alumno diseñe sus controladores, o puede enfocarse en el diseño de entornos virtuales y utilizar los controladores propios del sistema; de igual forma utilizando los entornos y controladores del sistema puede practicar el diseño de planeación de trayectorias, la Figura 5 muestra la versatilidad del sistema.
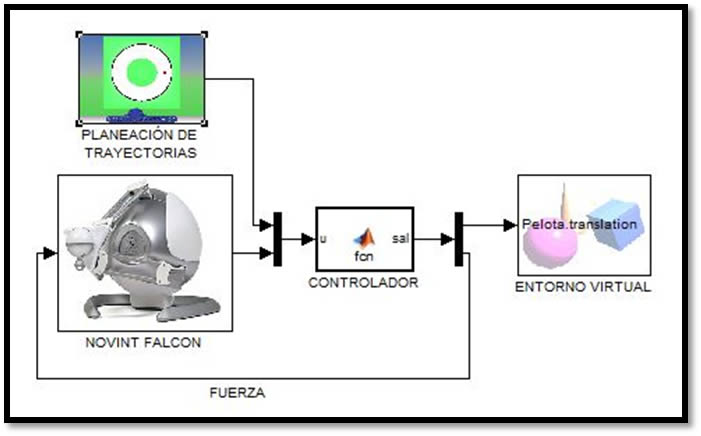
Figura 5. Sistema para la manipulación del Novint Falcon
Los bloques marcados con las líneas punteadas son en los que el alumno puede trabajar y crear sus propios mundos virtuales. En cada uno de ellos aplican los conocimientos en las asignaturas de Matemáticas, Control Moderno, Teoría de Control, Robótica, Mecatrónica, Control digital, Control Inteligente, entre otras. Se le plantean al estudiante diversas problemáticas a resolver, para este artículo se le da una aplicación a la medicina, el cual consiste en diseñar un entorno capaz de diagnosticar problemas de discapacidad motriz de miembro superior y que el doctor puede proponer una terapia apropiada de acuerdo a los resultados mostrados en el sistema.
planeación de trayectorias
Una de las finalidades de la planificación de trayectorias es que los movimientos realizados por el Novint Falcon sean suaves, para lo cual se diseñan basados en los polinomios de tercer hasta quinto orden, con esto la percepción del entorno virtual es mejor. Los alumnos son capaces de proponer diversas trayectorias que para este artículo se centran en problemáticas de rehabilitación.
El Novint Falcon es capaz de guiar al paciente a que realice movimientos circulares como parte de una terapia propuesta por un médico, estimulando su memoria muscular durante un tiempo determinado. La Figura 6 muestra la circunferencia utilizada para el guiado háptico del paciente.

Figura 6. Guiado háptico
Controlador PID
Un controlador PID (Proporcional Integrativo Derivativo) es ampliamente usado en la industria para el control de sistemas, debido a que es un control lineal, fácil de aplicar ya que no necesita el modelo matemático, solamente ocupa un punto de referencia, un sensor que retroalimente posición angular (encoder) y un actuador (motor de CD) para el experimento. El PID es un controlador que tiende minimizar el error ajustando la entrada del sistema.
Entorno virtual
El bloque VR Sink mostrado en la Figura 7 es el empleado en este trabajo y es una librería de Simulink 3D Animation que describe valores desde sus puertos a los campos del mundo virtual especificado en el cuadro de parámetros del bloque.
Se construyó una interfaz háptica con un dispositivo háptico Novint Falcon y se diseñó un entorno virtual donde el estudiante aprende los conceptos básicos de ambientes virtuales, control, robótica y renderizado háptico, entre otras. Este trabajo también puede extenderse al diagnóstico de pacientes con alguna discapacidad de miembro superior; por ejemplo, en mano, muñeca, entre otras.
En este mismo sentido, apoyados con el potencial que hoy en día tienen el uso de las tecnologías de la información es posible llevar una buena práctica de la labor como docentes en donde el alumno aplica los conceptos teóricos de las asignaturas de control lineal, mecatrónica, robótica, control inteligente, entre otras asignaturas y se vuelve muy dinámico el aprendizaje.
A través de este proyecto es posible concientizar sobre problemáticas sociales y áreas de oportunidad como lo es la robótica médica; mediante escenarios virtuales se proponen soluciones a problemas reales.
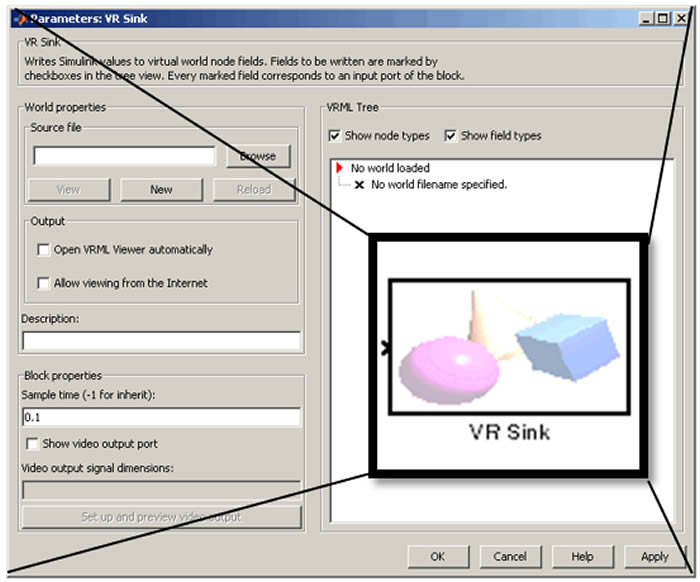
Figura 7. Bloque VR Sink y bloque de parámetros
El ambiente generado se realiza en el editor V-Realm Builder 2.0, mostrado en la Figura 8, propio de la librería Simulink 3D Animation; aquí se agregan todas las componentes del entorno virtual, siempre teniendo en cuenta la referencia en el sistema cartesiano X, Y y Z, debido a que al interactuar con el dispositivo Novint Falcon éste envía un vector de posición para modificar dicho ambiente. El ambiente consiste en una circunferencia que es la base para el diagnóstico y una terapia de rehabilitación.
También consta de una pequeña esfera que simula el puntero del dispositivo háptico para la exploración en dicho entorno.
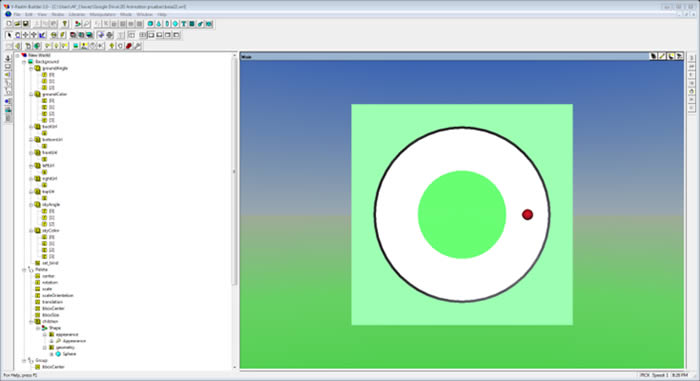
Figura 8. V-Realm Builder 2.0
González, L. R. (2011). ACTA. Obtenido de Visión global sobre tecnología háptica: http://www.acta.es/index.php/recursos/manuales-formativos-revista-digital/article/33
EcuRed. (2010). EcuRed Conocimiento con todos y para todos. Obtenido de http://www.ecured.cu/index.php/Tecnolog%C3%ADa_h%C3%A1ptica
Novint Technologies, I. (2007). R&D 100 Award Entry Form. Novint 3D Haptics Technology Software. USA: Sandia National Laboratories.
Tangient LLC. (2015).CONTROL PID, METODOLOGÍA Y APLICACIONES. Obtenido de http://control-pid.wikispaces.com/
The MathWorks, In (2015). Obtenido de http://www.mathworks.com/
[a] Profesor Investigador de la Facultad de Ingeniería Electromecánica, de la Universidad de Colima. jglau@ucol.mx, mduran@ucol.mx, scharre@ucol.mx.
[b] Profesor Investigador del Área Académica de Ingenierías, en la Escuela Superior de Tlahuelilpan, de la Universidad Autónoma del Estado de Hidalgo. daniel@uaeh.edu.mx, ocotlan@diazparra.net.
[c] Académico de la Facultad de Ingeniería Electromecánica, de la Universidad de Colima. fidel_chavez@ucol.mx